以下安全功能集成在ACOPOSmulti SafeMOTION逆变模块中,使用它们可以实现以下安全水平:
安全功能 | EN ISO 13849-1 | EN 61508 / EN 62061 | 必要的安全 | ||
|---|---|---|---|---|---|
EnDat 2.2 | SinCos | EnDat 2.2 | SinCos | ||
安全扭矩断开(STO) | PLe / CAT 4 | PLe / CAT 4 | SIL 3 | SIL 3 | 无 |
安全扭矩断开单通道(STO1) | PLd / CAT 3 | PLd / CAT 3 | SIL 2 | SIL 2 | 无 |
安全操作停止(SOS) | PLd / CAT 3 | 最大PLe / CAT 4* | SIL 2 | 最大SIL 3* | 有 |
安全停止1(SS1) | 时间监控: | 时间监控: | 时间监控: | 时间监控: | 时间监控: |
安全停止2(SS2) | PLd / CAT 3 | 最大PLe / CAT 4* | SIL 2 | 最大SIL 3* | 有 |
安全限速(SLS) | PLd / CAT 3 | 最大PLe / CAT 4* | SIL 2 | 最大SIL 3* | 有 |
安全最大速度(SMS) | PLd / CAT 3 | 最大PLe / CAT 4* | SIL 2 | 最大SIL 3* | 有 |
安全方向(SDI) | PLd / CAT 3 | 最大PLe / CAT 4* | SIL 2 | 最大SIL 3* | 有 |
安全限距(SLI) | PLd / CAT 3 | 最大PLe / CAT 4* | SIL 2 | 最大SIL 3* | 有 |
安全限制加速(SLA) | PLd / CAT 3 | 最大PLe / CAT 4* | SIL 2 | 最大SIL 3* | 有 |
安全抱闸控制(SBC) | PLd / CAT 3 | PLd / CAT 3 | SIL 2 | SIL 2 | 无 |
安全限位(SLP) | PLd / CAT 3 | 最大PLe / CAT 4* | SIL 2 | 最大SIL 3* | 有 |
安全最大位置(SMP) | PLd / CAT 3 | 最大PLe / CAT 4* | SIL 2 | 最大SIL 3* | 有 |
安全回零 | PLd / CAT 3 | 最大PLe / CAT 4* | SIL 2 | 最大SIL 3* | 有 |
安全抱闸测试(SBT) | - | 最大PLd / CAT 3* | - | 最大SIL 2* | 有 |
剩余安全位置(RSP) | PLd / CAT 3 | - | SIL 2 | - | 有 |
| * | 取决于所使用的编码器 |
STO - 安全扭矩断开
STO - 安全扭矩断开
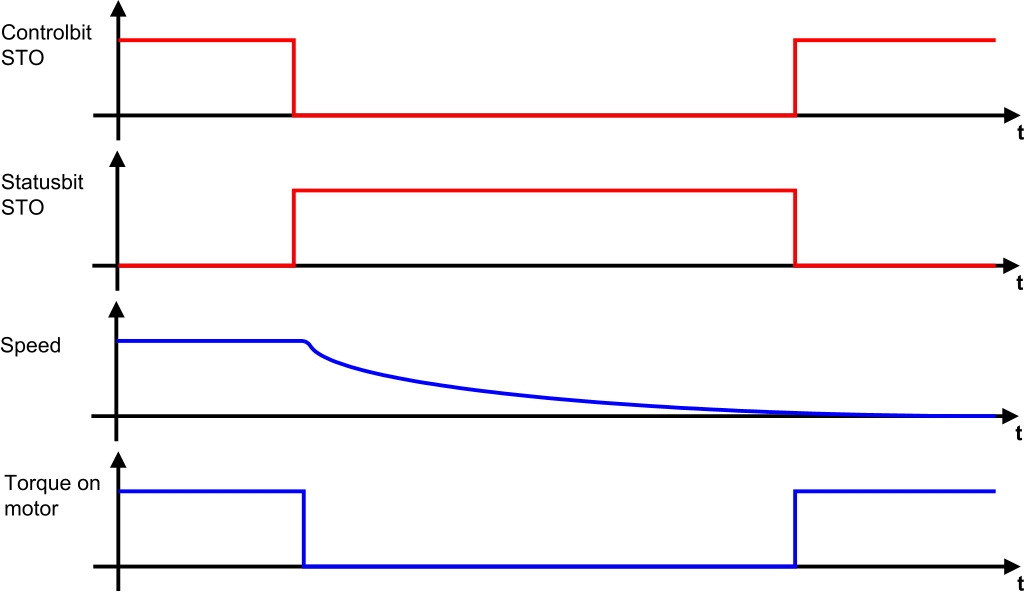
安全断开扭矩是电机不再提供驱动力时的状态(如无扭矩和力)。驱动器电源由启动安全截止脉冲安全切断。因为驱动器不再能够产生扭矩,所以不可能发生潜在危险动作。
STO作为SafeLOGIC的一项集成安全功能可以通过网络实现,无需使用外部接线。
STO安全功能为所有其它安全功能提供基础。作为闭路原理的应用,每当出错时它都适用。
STO1 - 安全扭矩断开1
STO1 - 安全扭矩断开1
STO1安全功能的工作方式与STO相同。唯一不同的是,无论是HighSide还是LowSide IGBT,它们的关断都取决于配置。
SOS - 安全操作停止
SOS - 安全操作停止
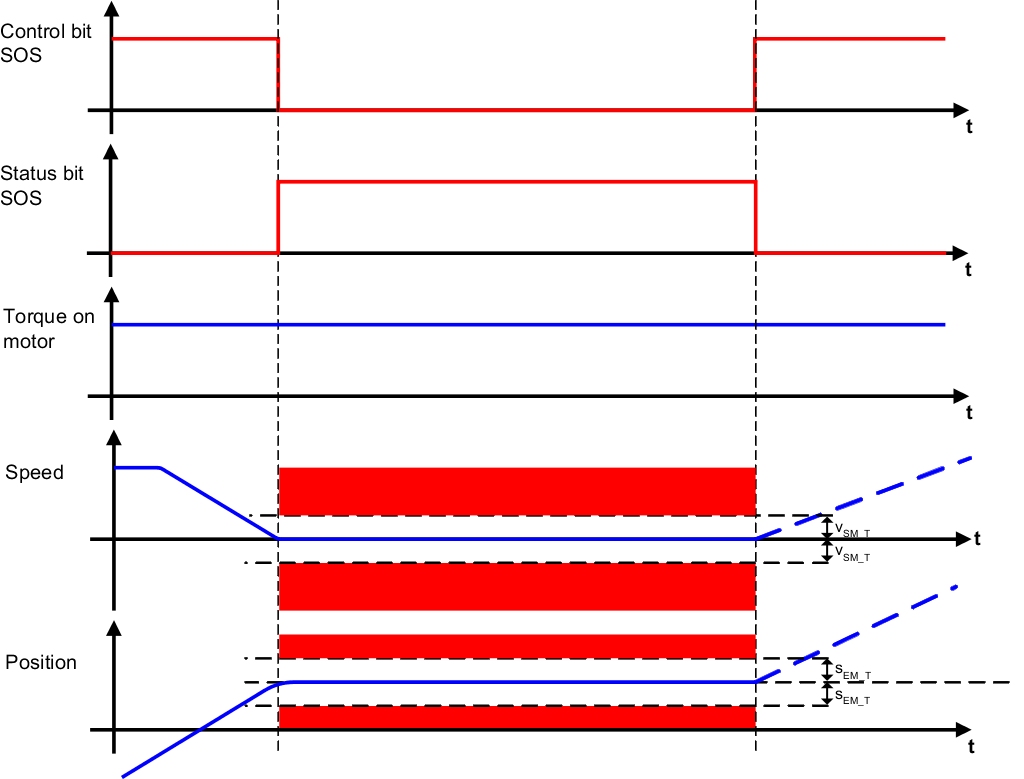
安全操作停止(SOS)是被监控的驱动器安全停止状态。驱动器供电并产生扭矩和力。电子控制器和驱动电机之间的所有控制功能都是启动的。通过一个可配置的停止偏差窗口来监控轴停止。位置和速度偏差都可以被监控。为了以安全的方式采集速度和位置数据,需要使用一个合适的安全编码器。如果监控的停止范围发生偏差,那么就会启动安全截止脉冲,并确保将驱动器切换至出错状态。
安全停止1(SS1)
安全停止1(SS1)
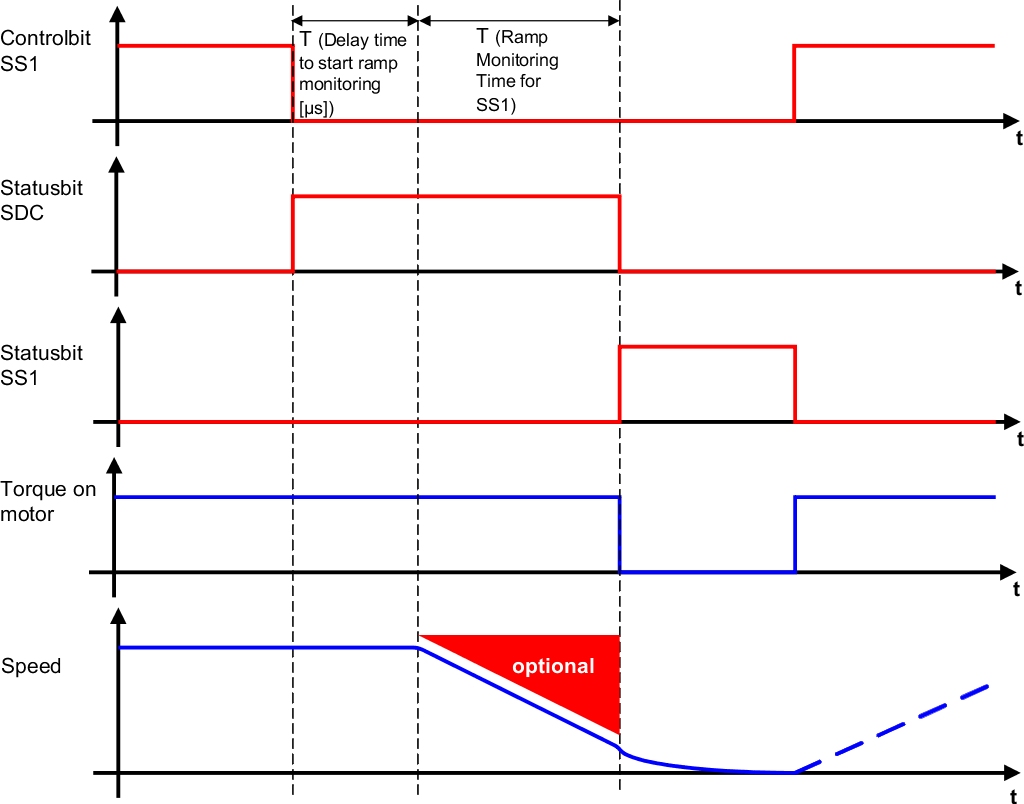
在安全停止1(SS1)时,电机从运动至停止被安全地监控。经过减速后,启动安全截止脉冲并切断驱动器扭矩和电源。根据不同的安全功能要求,要么只监控减速时间,要么还会监控减速斜坡。如果在减速时监控范围发生偏差,那么立即启动安全截止脉冲并进入出错状态。减速斜坡监控的优点是,一旦出错,就会缩小假定的剩余停止距离。
SS2 - 安全停止2
SS2 - 安全停止2
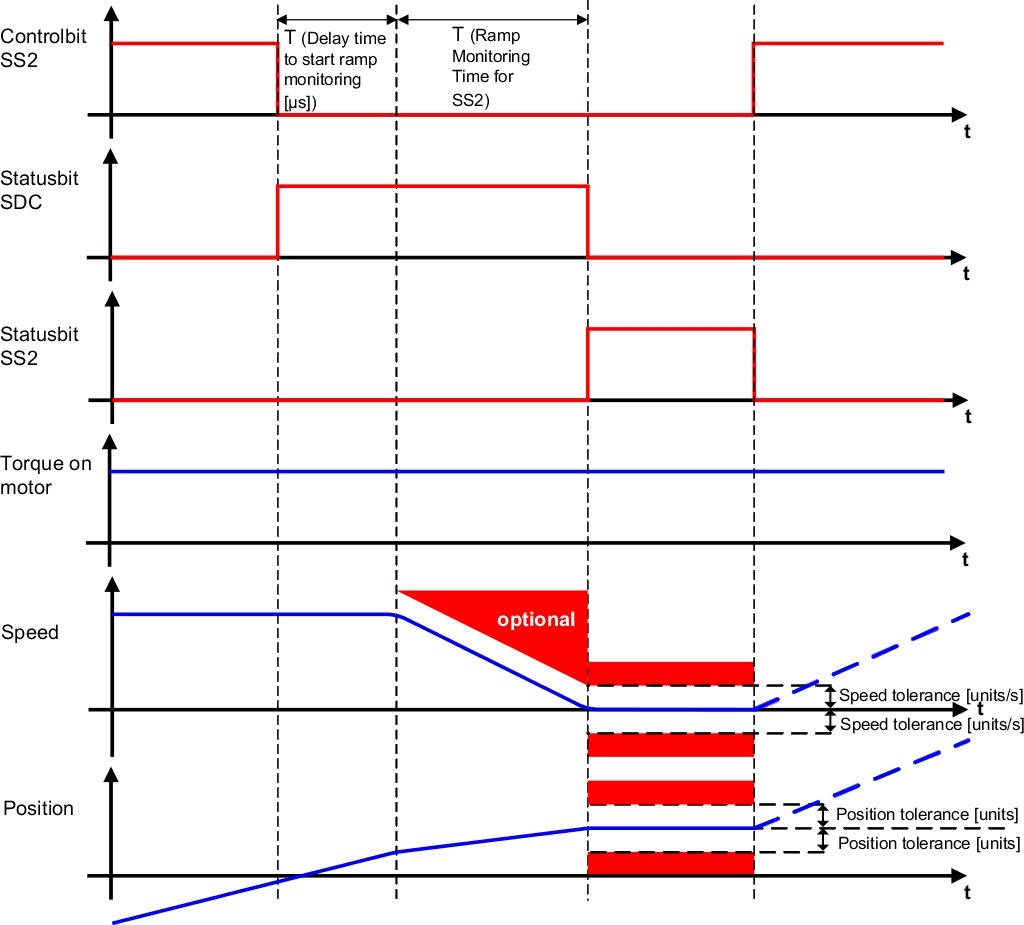
在安全停止2(SS2)时,电机从运动至停止被安全地监控。然后必须将驱动器保持在标准应用的静止状态。和SOS一样,SafeMOTION模块根据已配置的偏差窗口来监控这一停止。
和SS1一样,根据不同的安全功能要求,要么只监控减速时间,要么还会监控减速斜坡。如果在斜坡监控或随后的停止监控中发生偏差,那么立即启动安全截止脉冲并进入出错状态。
SLS - 安全限速
SLS - 安全限速
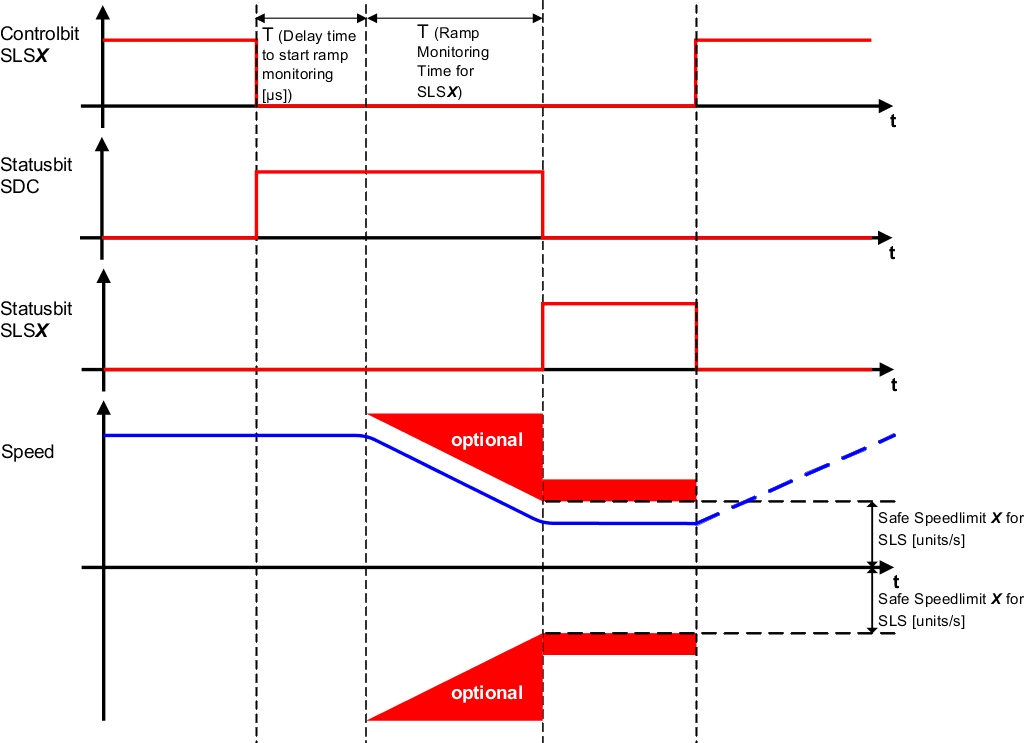
SLS安全功能可以监控驱动器从而确保不会超出可配置的速度范围。根据不同的应用,还可以监控减速直到达到限定。根据不同的要求,减速斜坡监控可以设置成只监控减速时间或还可以监控减速斜坡。在监控速度范围时如果检测到偏差,那么会立即启动安全截止脉冲并进入出错状态。
SMS - 安全最大速度
SMS - 安全最大速度
SMS与SLS的区别是,SMS不能主动进行。要么设置为启动,要么设置为关闭。在启动时,会根据定义的范围不断监控当前速度。如果超出范围,那么就会立即启动安全截止脉冲并进入出错状态。
SDI - 安全方向
SDI - 安全方向
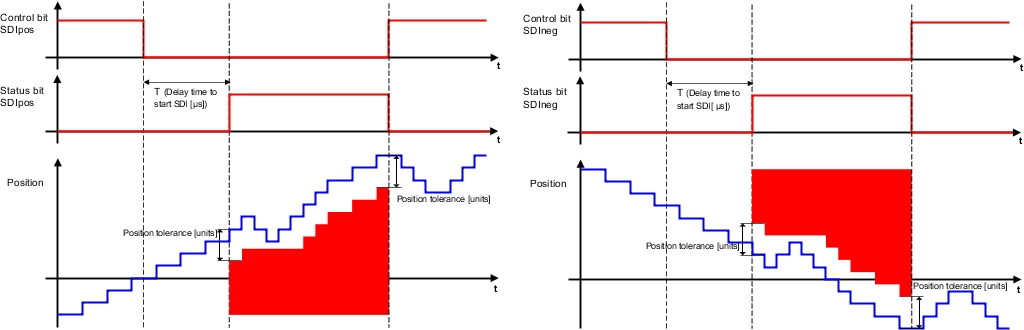
SDI安全功能可以监控定义的运动方向。如果间隔发生偏差,那么就会立即启动安全截止脉冲并进入出错状态。正负方向都可以监控。
该安全方向功能可以与其它安全功能并行启动。
例如,SLS可以限制在某一方向。
SLI - 安全限距
SLI - 安全限距
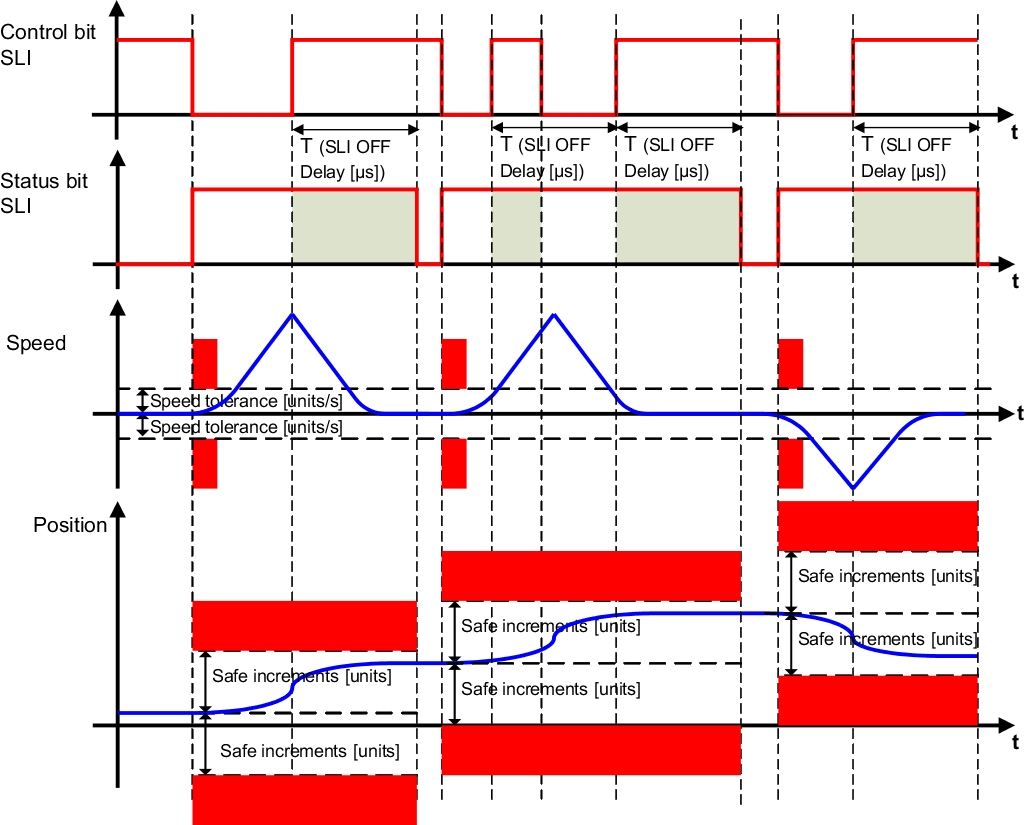
SLI安全功能可以监控运动从而维持定义的距离。
启动该功能时必须停止安全轴。创建一个位置窗口来实现安全监控。这一位置窗口取决于已配置的安全间隔。
如果间隔发生偏差,那么就会立即启动安全截止脉冲并进入出错状态。
SLA - 安全限制加速
SLA - 安全限制加速
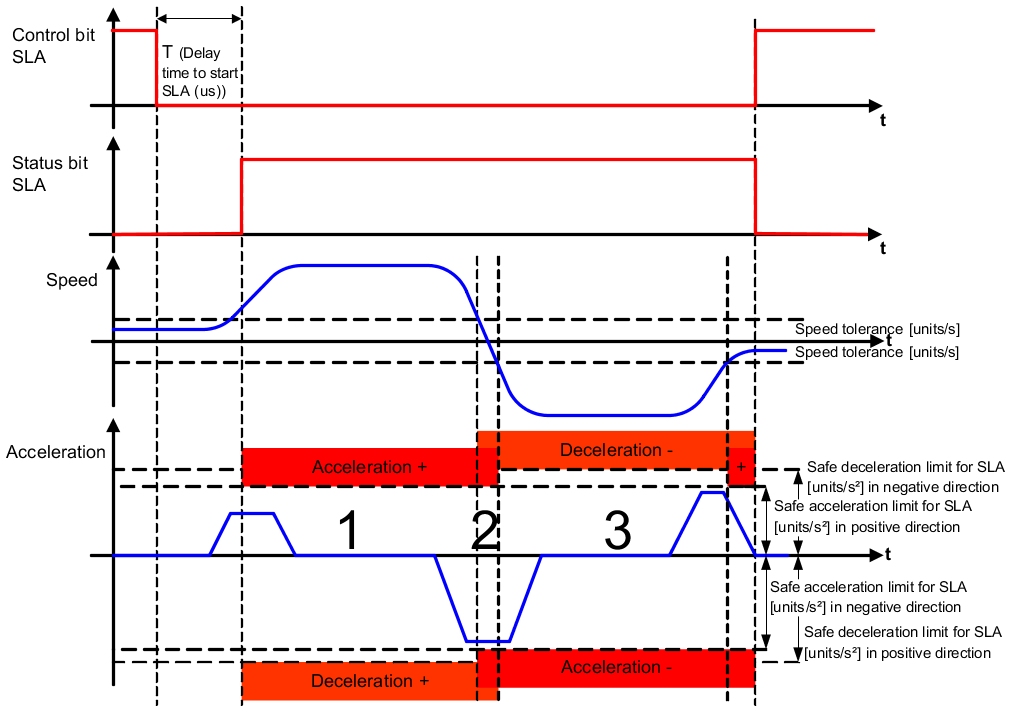
SLA安全功能用于监控在最大限度内的加速或减速。
加速和减速限制在运动的正方向上被监控。
配置时间过期后监控配置限制。该延迟时间对标准和安全应用的不同运行时间做出补偿。
SBC - 安全抱闸控制
SBC - 安全抱闸控制
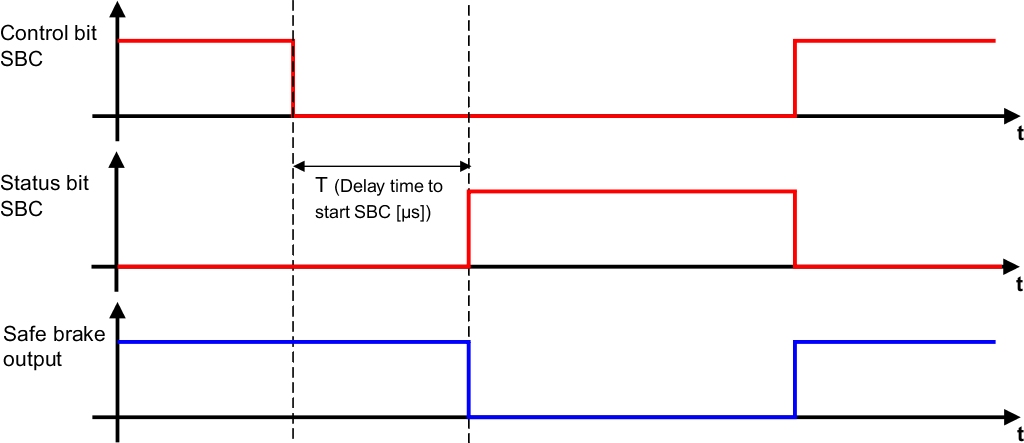
安全抱闸控制(SBC)可以发送一个安全输出信号来控制一个外闸。SBC集成安全功能可以通过SafeLOGIC或模块出错时被请求。根据所连接的抱闸质量及其接线不同,SBC功能可以满足EN 61508中的SIL2。
SLP - 安全限位
SLP - 安全限位
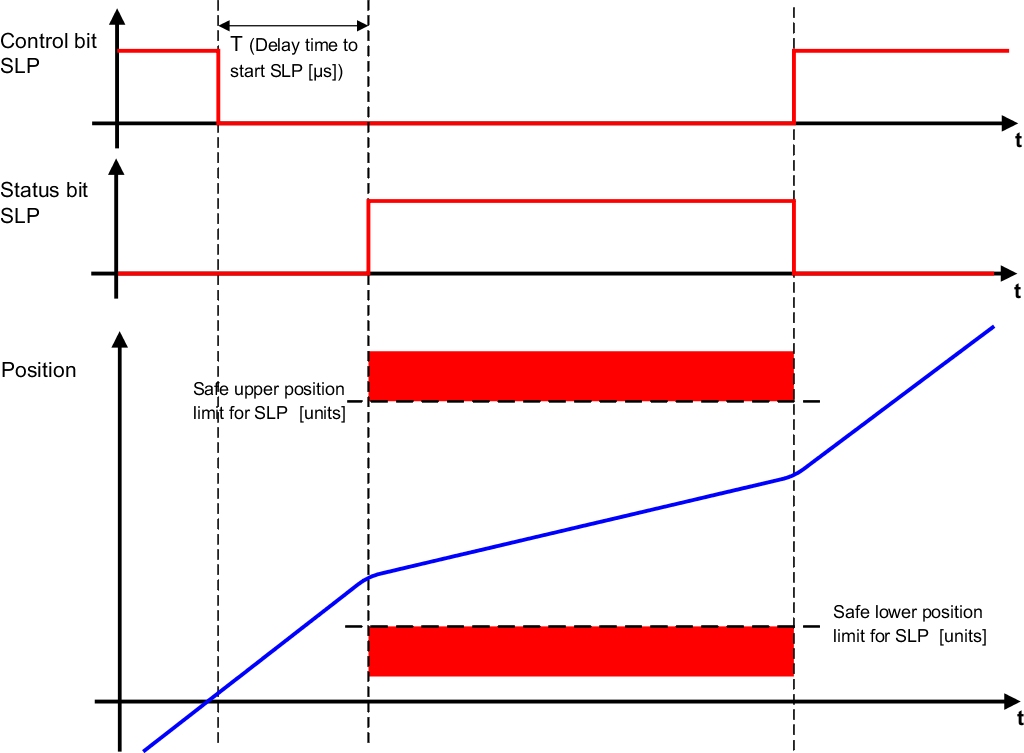
SLP安全功能的目标是监控指定位置窗口。
参数可以用来配置监控范围内的定位下限和上限。当接近限位时,可以以这种方式计算监控的速度限制,即在达到限位之前,驱动器将会通过使用配置的减速斜坡参数实现完全停止。
SMP - 安全最大位置
SMP - 安全最大位置
SMP(安全最大位置)与SLP的区别是,SMP不能主动进行。要么设置为启动,要么设置为关闭。
在启动时,会根据定义的位置窗口不断监控当前位置。由于需要一个安全的绝对位置,因此SMP安全功能只能与已回零的轴一起工作。
由于具备SLP安全功能,因此除了位置之外,SMP功能也可以监控独立于位置的速度限制,从而如果超过位置窗口,那么就能最大限度地减小剩余距离。
安全回零
安全回零
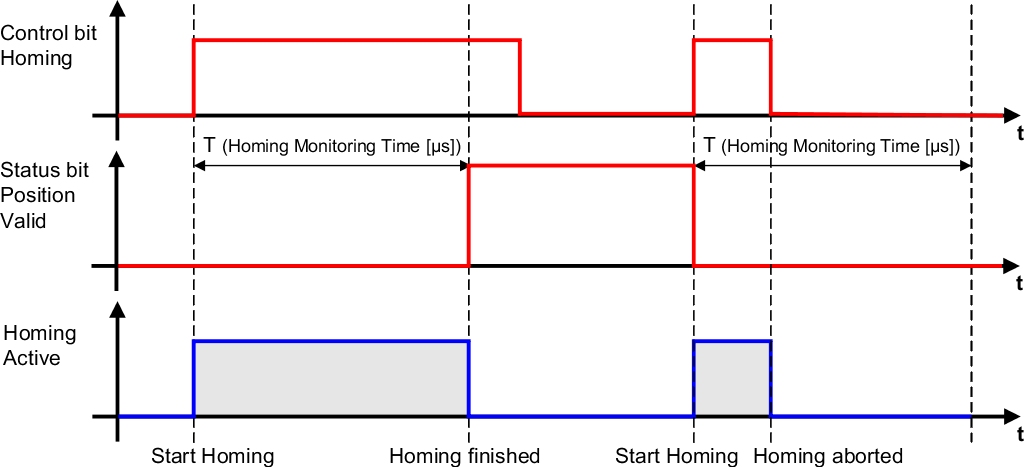
安全回零功能为在编码器位置和机器位置之间建立参考提供了一种方法。
根据不同的回零模式,驱动器执行回零程序是必要的。回零程序需要启动电子控制器和驱动电机之间的控制功能。为了防止在回零过程中出现危险状况,可以选择使用其它安全功能。
SBT - 安全抱闸测试
SBT - 安全抱闸测试
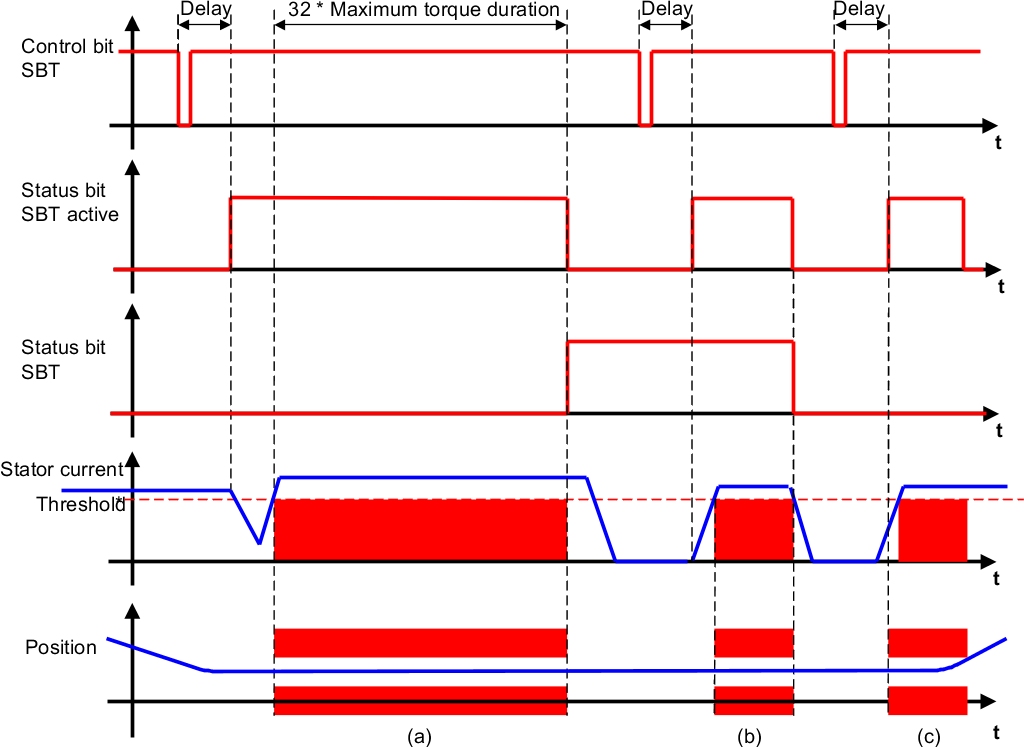
SBT(安全抱闸测试)安全功能可以通过施加一定时间内的可配置定子电流对抱闸进行测试。
SBT安全功能并非常规安全功能!它仅用于通过施加一定时间内的可配置定子电流测试抱闸。
测试在指定的安全水平和精度下进行。
RSP - 剩余安全位置
RSP - 剩余安全位置
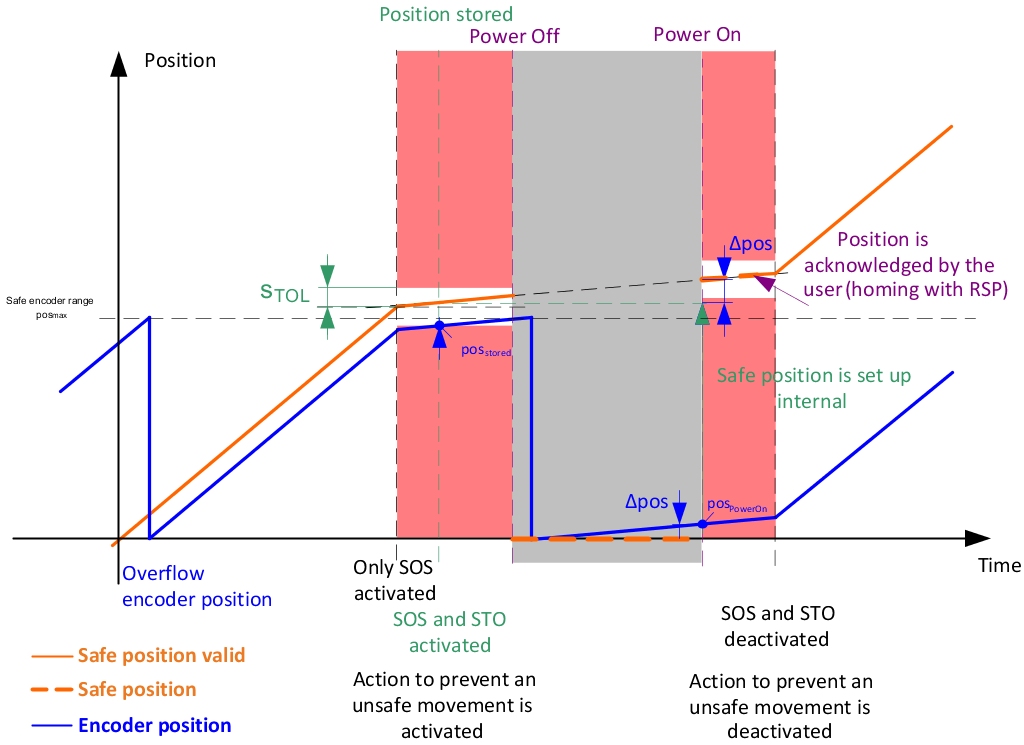
凭借RSP安全功能,在安全位置回至机器位置后,开/关一次后已回零的安全位置不必再次回零。
驱动器受控停止后,只能存储有效位置数据。因此,必须保证停止。还必须确保在数据保存过程中不向驱动器供电,从而不会驱动驱动器。当使用STO和SOS安全功能时,可以满足这些需求。