Охлаждение / тип конструкции (b)
Охлаждение / тип конструкции (b)
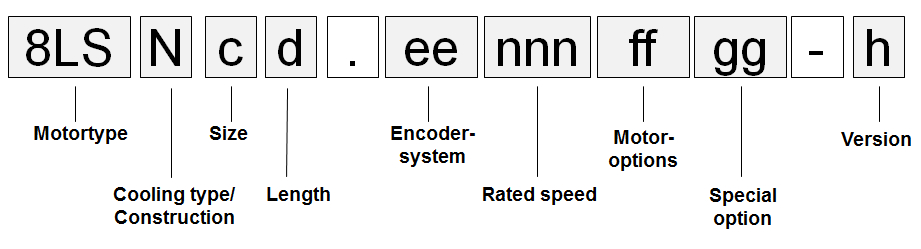
3-фазные синхронные двигатели 8LSN оснащены самостоятельным охлаждением и имеют удлиненную конструкцию. Двигатели должны монтироваться на охлаждающей поверхности (фланце).
Типоразмер (с)
Типоразмер (с)
Поставляется 2 типоразмера трехфазных синхронных двигателей 8LSN (4 и 5). Они отличаются по размерам (особенно по размерам фланца) и по номинальной мощности. Различные типоразмеры можно отличить по числовому коду (c) в номере модели. Чем больше номер, тем больше размеры фланца и номинальная мощность соответствующего двигателя.
Вид охлаждения | Имеется для типоразмера | |
|---|---|---|
4 | 5 | |
A | Да | Да |
Длина (d)
Длина (d)
трехфазных синхронных двигателей 8LT может иметь до 5 значений. Они имеют различную номинальную мощность при идентичных размерах фланца. Различные значения длины можно отличить по числовому коду (d) в номере модели.
Длина | Имеется для типоразмера | |
|---|---|---|
4 | 5 | |
3 | Да | - |
4 | Да | Да |
5 | Да | Да |
6 | Да | Да |
7 | - | Да |
8 | - | Да |
Система энкодера (ee)
Система энкодера (ee)
Резольвер
В серводвигателях используются резольверы BRX. Они получают единственный синусоидальный сигнал (опорный сигнал) и выдают два синусоидальных сигнала. Амплитуда этих сигналов изменяется с угловым положением (как синусная или косинусная зависимость).
Название | Код заказа (ee) |
|---|---|
R0 | |
Точность | 10 угловых минут |
Нелинейность | 1 угл. мин |
Вибрация при эксплуатации | ≤ 100 м/с². |
Ударная нагрузка при эксплуатации | ≤ 400 м/с². |
Энкодер EnDat
EnDat – стандарт, разработанный в Johannes Heidenhain GmbH, который включает преимущества абсолютного и инкрементального методов измерения позиции, а также имеет память для считывания/записи параметров в энкодере. При абсолютном измерении позиции (абсолютная позиция считывается последовательно) обычно не требуется процедура коррекции исходной позиции. При необходимости следует установить многооборотный энкодер (4096 оборотов). Однооборотный энкодер может также использоваться с выключателем опорных (реперных) точек. В этом случае необходимо выполнить процедуру коррекции исходной позиции. Инкрементальный процесс обладает короткими временами задержки, необходимыми для измерения позиции на приводах с исключительными динамическими характеристиками.
В зависимости от требований могут использоваться различные типы энкодеров EnDat:
Название | Код заказа (ee) | |||||
|---|---|---|---|---|---|---|
E0 | E1 | EA | EB | DA | DB | |
Тип энкодера | EnDat, однооборотный | EnDat, многооборотный | EnDat, однооборотный | EnDat, многооборотный | EnDat, однооборотный | EnDat, многооборотный |
Принцип работы | Оптический | Оптический | Индуктивный | Индуктивный | Индуктивный | Индуктивный |
Протокол EnDat | EnDat 2.1 | EnDat 2.1 | EnDat 2.1 | EnDat 2.1 | EnDat 2.2 | EnDat 2.2 |
Разрешение | 512 линий | 512 линий | 32 линии | 32 линии | 32 линии | 32 линии |
Распознаваемый Оборотов | --- | 4096 | --- | 4096 | --- | 4096 |
Точность | ±60" | ±60" | ±180" | ±180" | ±65" | ±65" |
Частота среза | ≥ 100 кГц (-3 дБ) | ≥ 100 кГц (-3 дБ) | ≥ 6 кГц (-3 дБ) | ≥ 6 кГц (-3 дБ) | --- | --- |
Вибрация при эксплуатации1) 55 < f ≤ 2000 Гц | ≤ 300 м/с² | ≤ 300 м/с² | ≤ 200 м/с² | ≤ 200 м/с² | Статор: ≤400 м/с; ротор: ≤600 м/с | Статор: ≤400 м/с; ротор: ≤600 м/с |
Ударная нагрузка при эксплуатации2) Продолжительность 6 мс | ≤ 2000 м/с² | ≤ 2000 м/с² | ≤ 2000 м/с² | ≤ 2000 м/с² | ≤2000 м/с | ≤2000 м/с |
Изготовитель Интернет-адрес | Dr. Johannes Heidenhain GmbH www.heidenhain.de | |||||
Код изделия изготовителя | ECN1313 | EQN1325 | ECI1319 | EQI1331 | ECI1319 FS | EQI1331 FS |
| 1) | В соответствии с IEC 60 068-2-6 |
| 2) | В соответствии с IEC 60 068-2-27 |
Индуктивные энкодеры "EA" и "EB" заменяют типы энкодеров с номерами модели "E2" и "E3". Эти энкодеры должны использоваться во всех новых приложениях. Сервоприводы ACOPOS с прошивкой V2.31 или выше и устройства ACOPOSmulti с прошивкой V.2.090 или выше совместимы с этими энкодерами.
Энкодер EnDat 2.2
Общая информация
Системы дискретных сервоприводов и контуры управления положением с приборами определения позиции для определения измеренных значений требуют быстрой и чрезвычайно безопасной передачи данных от измерительных устройств. Кроме того, должны собираться и другие данные, например специфические характеристики сервопривода, таблицы коррекций и т. д. Чтобы гарантировать высокий уровень безопасности системы, измерительные устройства должны быть интегрированы в процедуры обнаружения ошибок и иметь возможности диагностики.
Интерфейс EnDat от HEIDENHAIN является дискретным, двунаправленным интерфейсом для измерительных устройств. Он способен выдавать значения позиции от инкрементальных и абсолютных измерительных устройств, а также считывать и обновлять информацию на измерительном устройстве или сохранять туда новые данные. В нем используется передача данных в последовательном формате, поэтому необходимы только 4 сигнальные линии. Данные передаются синхронно с сигналом синхронизации, определенным последующей электроникой. Используемый тип передачи (например, значения позиции, параметры, диагностика и т. д.) выбирается с помощью команд режима, посланных в измерительное устройство последующей электроникой.
Технические характеристики
В зависимости от задачи могут использоваться различные энкодеры EnDat 2.2 (однооборотные или многооборотные).
Название | Код заказа (ee) | |||
|---|---|---|---|---|
D0 | D1 | DA | DB | |
Тип энкодера | EnDat, однооборотный | EnDat, многооборотный | EnDat, однооборотный | EnDat, многооборотный |
Принцип работы | Оптический | Оптический | Индуктивный | Индуктивный |
Протокол EnDat | EnDat 2.2 | EnDat 2.2 | EnDat 2.2 | EnDat 2.2 |
Значений позиции за оборот | 33 554 432 (25 бит) | 33 554 432 (25 бит) | 524 288 (19 бит) | 524 288 (19 бит) |
Распознаваемые обороты | --- | 4096 | --- | 4096 |
Точность | ±20" | ±20" | ±65" | ±65" |
Вибрация при эксплуатации1) | ≤ 300 м/с2(МЭК 60068-2-6) | ≤ 300 м/с2(МЭК 60 068-2-6) | Статор: ≤ 400 м/с; ротор: ≤ 600 м/с 2 (МЭК 60 068-2-6) | Статор: ≤ 400 м/с; ротор: ≤ 600 м/с 2 (МЭК 60 068-2-6) |
Ударная нагрузка при эксплуатации Продолжительность 6 мс | ≤ 1000 м/с2/ ≤ 2000 м/с2(МЭК 60068-2-27) | ≤ 1000 м/с2/ ≤ 2000 м/с2(МЭК 60068-2-27) | ≤ 2000 м/с (МЭК 60068-2-27) | ≤ 2000 м/с (МЭК 60068-2-27) |
Изготовитель Интернет-адрес | Dr. Johannes Heidenhain GmbH www.heidenhain.de | |||
Код изделия изготовителя | ECN 1325 | EQN 1337 | ECI 1319 | EQI 1331 |
| 1) | Согласно стандарту при комнатной температуре; следующие значения действительны при рабочей температуре до 100 °C: ≤ 300 м/с2, до 115 °C: ≤ 150 м/с2; 10–55 Гц, постоянное смещение, полный размах 4,9 мм. |
Номинальная скорость (nnn)
Номинальная скорость (nnn)
Трехфазные синхронные двигатели 8LSN могут иметь до пяти различных значений номинальной скорости в зависимости от типоразмера и длины.
Типоразмер | Доступные номинальные угловые скорости nn[об/мин] | |||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
2000 | 2200 | 3000 | 4500 | 6000 | ||||||||||||||||||
4 | - | - | - | - | - | - | Да | Да | Да | Да | - | - | - | - | - | - | - | - | Да | Да | Да | Да |
5 | Да | Да | Да | Да | Да | Да | - | Да | Да | Да | Да | Да | - | Да | Да | Да | Да | Да | - | - | - | - |
Длина | 4 | 5 | 6 | 7 | 7 | 8 | 3 | 4 | 5 | 6 | 7 | 8 | 3 | 4 | 5 | 6 | 7 | 8 | 3 | 4 | 5 | 6 |
Направление соединения (ff)
Направление соединения (ff)

Сальник (ff)
Сальник (ff)
Все трехфазные синхронные двигатели 8LSN поставляются с опциональным сальником формы А согласно DIN 3760.
Снабженные сальником двигатели имеют защиту IP65 согласно EN 60034-5.
На протяжении всего срока службы двигателя должна быть обеспечена надлежащая смазка сальника.
Фиксирующий тормоз (ff)
Фиксирующий тормоз (ff)
Все трехфазные синхронные двигатели 8LSN могут поставляться с фиксирующим тормозом. Он устанавливается прямо за фланцем А на двигателе и используется, чтобы удержать вал двигателя, когда на серводвигатель не подается энергопитание.
Фиксирующий тормоз представляет собой пружинный тормоз и управляется сервоприводом ACOPOS или модулем инвертора ACOPOSmulti. Такой тип от фиксирующего тормоза обеспечивает минимальный свободный ход.
Этот тормоз предназначен для использования только в качестве фиксирующего тормоза, не разрешается использовать его для стандартного рабочего торможения! При надлежащей эксплуатации тормоз имеет срок службы приблизительно 5 000 000 циклов (отпускание и повторное включение тормоза – один цикл). Торможение под нагрузкой при аварийном останове разрешено, но сокращает его срок службы. Необходимый удерживающий момент тормоза определяется на основании фактического нагружающего момента. Если момент нагрузки не известен с достаточной достоверностью, рекомендуется принять коэффициент безопасности 2.
Название | Типоразмер двигателя | |
|---|---|---|
4 | 5 | |
Удерживающий момент MBr[Н·м] | 8 | 15 |
Подключенная нагрузка Pвкл.[Вт] | 18 | 24 |
Ток питания Iвкл.[A] | 0,75 | 1 |
Напряжение питания Uвкл.[В] | 24 В= +6 % / -10 % | 24 В= +6 % / -10 % |
Задержка включения tвкл.[мс] | 40 | 50 |
Задержка отпускания tвыкл.[мс] | 7 | 10 |
Момент инерции JBr[кгсм²] | 12:54 AM | 1,66 |
Масса mBr[кг] | 12:46 AM | 0,9 |
Конец вала (ff)
Конец вала (ff)
Валы всех трехфазных синхронных двигателей 8LSN соответствуют DIN 748. Они могут поставляться с гладким валом или с валом с призматической шпонкой.
Гладкий конец вала используется для прессового соединения вала со втулкой, которое обеспечивает безлюфтовое соединение между валом и втулкой, а также высокую плавность вращения. Конец вала имеет центральное резьбовое отверстие.
Вал с призматической шпонкой может использоваться для передачи крутящего момента путем кинематического замыкания с низкими требованиями к соединению вала со втулкой и для того, чтобы передавать крутящий момент с постоянным направлением.
Шпоночные пазы для трехфазных синхронных двигателей 8LSN соответствуют шпоночному пазу формы N1 согласно DIN 6885-1. Используются валы со шпонкой формы А, соответствующие DIN 6885-1. Балансирование двигателей со шпоночными пазами выполняется с использованием полушпонок согласно DIN ISO 8821.
Конец вала имеет центральное резьбовое отверстие, которое может использоваться для крепления элементов привода с использованием концевых пластин вала.
Специальные варианты конструкции двигателя (gg)
Специальные варианты конструкции двигателя (gg)
00...Двигатель без специальных характеристик
Версия двигателя (h)
Версия двигателя (h)
Версия двигателя автоматически указывается конфигуратором; ее можно видеть в технических данных.
Код заказа для вариантов конструкции двигателя (ff)
Соответствующая группа (ff) для кода заказа приведена в следующей таблице:
Вариант конструкции двигателя | ||||
|---|---|---|---|---|
Направление соединения | Сальник | Фиксирующий тормоз | Конец вала | Группа в коде заказа (ff) |
Прямой (верхний соединитель) | Нет | Нет | Гладкий | C0 |
Со шпонкой | C1 | |||
Нормал. | Гладкий | C2 | ||
Со шпонкой | C3 | |||
Да | Нет | Гладкий | C6 | |
Со шпонкой | C7 | |||
Нормал. | Гладкий | C8 | ||
Со шпонкой | C9 | |||
Угловой (поворотный соединитель) | Нет | Нет | Гладкий | D0 |
Со шпонкой | D1 | |||
Нормал. | Гладкий | D2 | ||
Со шпонкой | D3 | |||
Да | Нет | Гладкий | D6 | |
Со шпонкой | D7 | |||
Нормал. | Гладкий | D8 | ||
Со шпонкой | D9 | |||
Пример заказа 1
Пример заказа 1
Для приложения был выбран трехфазный синхронный двигатель типа8LSN45с номинальной частотой вращения 3000 об/мин. Из-за конструктивных особенностей кабели можно подсоединить только на верхней стороне двигателя ("верхнее" направление соединения). Двигатель должен также быть оборудован фиксирующим тормозом, валом с призматической шпонкой и однооборотным датчиком положения EnDat на 16 линий.
В поле кодовой группы (ee) для системы энкодеров следует ввестиEA.
Кодом (nnn) для номинальной частоты вращения 3000 об/минявляется030.
В поле кодовой группы (ff) для других опций (сальник, фиксирующий тормоз, вал с призматической шпонкой и направление соединения) вводитсяC3.
Номер модели для требуемого двигателя имеет следующий вид8LSN45.EA030C300-0
Пример заказа 2
Пример заказа 2
Для приложения был выбран трехфазный синхронный двигатель типа8LSA56с номинальной частотой вращения 4500 об/мин. Из-за конструктивных особенностей кабели можно подсоединить только с задней стороны двигателя (поворотные соединители). Двигатель должен также быть оборудован фиксирующим тормозом, гладким валом, сальником и многооборотным энкодером EnDat на 16 линий.
В поле кодовой группы (ee) для системы энкодеров следует ввестиEB.
Кодом (nnn) для номинальной частоты вращения 4500 об/минявляется045.
В поле кодовой группы (ff) для других опций (сальник, фиксирующий тормоз, гладкий вал и направление соединения) вводитсяD8.
Номер модели для требуемого двигателя имеет следующий вид8LSN56.EB045D800-0