Производство с ACOPOStrak - быстро и просто
Программный пакет mapp Trak упрощает разработку приложений для интеллектуальной транспортной системы ACOPOStrak и ускорояет время выхода новой продукции на рынок. Он служит для легкой интеграции системы предотвращения столкновений шаттлов, настройки виртуальных барьеров, контроля за ограничением скорости и много другого.
Увеличение производительности

Экономия времени и средств
Пакет mapp Trak облегчает работу с интеллектуальными конвейерными системами. Использование mapp Trak ускорит время выхода новой продукции на рынок и ускоренный возврат инвестиций.

Простота и удобство программирования конвейра
При использовании mapp Trak приложение создается с использованием процессно-ориентированной модели программирования. Необходимо просто назначить правила движения шаттлов по конвейеру.

Используйте силу моделирования
Возможности интегрированных средств для моделирования и симуляции в mapp Trak позволит точно определить число и скорость шаттлов для максимальной эффективности всей системы.

Воспользуйтесь отслеживанием в соответствии с требованиями FDA
mapp Trak связывает данные о продукте с соответствующими шаттлами, что обеспечивает возможность отслеживать весь производственный процесс.
Хай-вей для продукции
Масштабируемая архитектура ACOPOStrak позволяет создавать конвейер с длиной трека более 100 метров, оснащенный сотнями шаттлов. Но работа даже с самыми сложными транспортными система становиться в разы проще с mapp Trak.
Столкновение невозможно
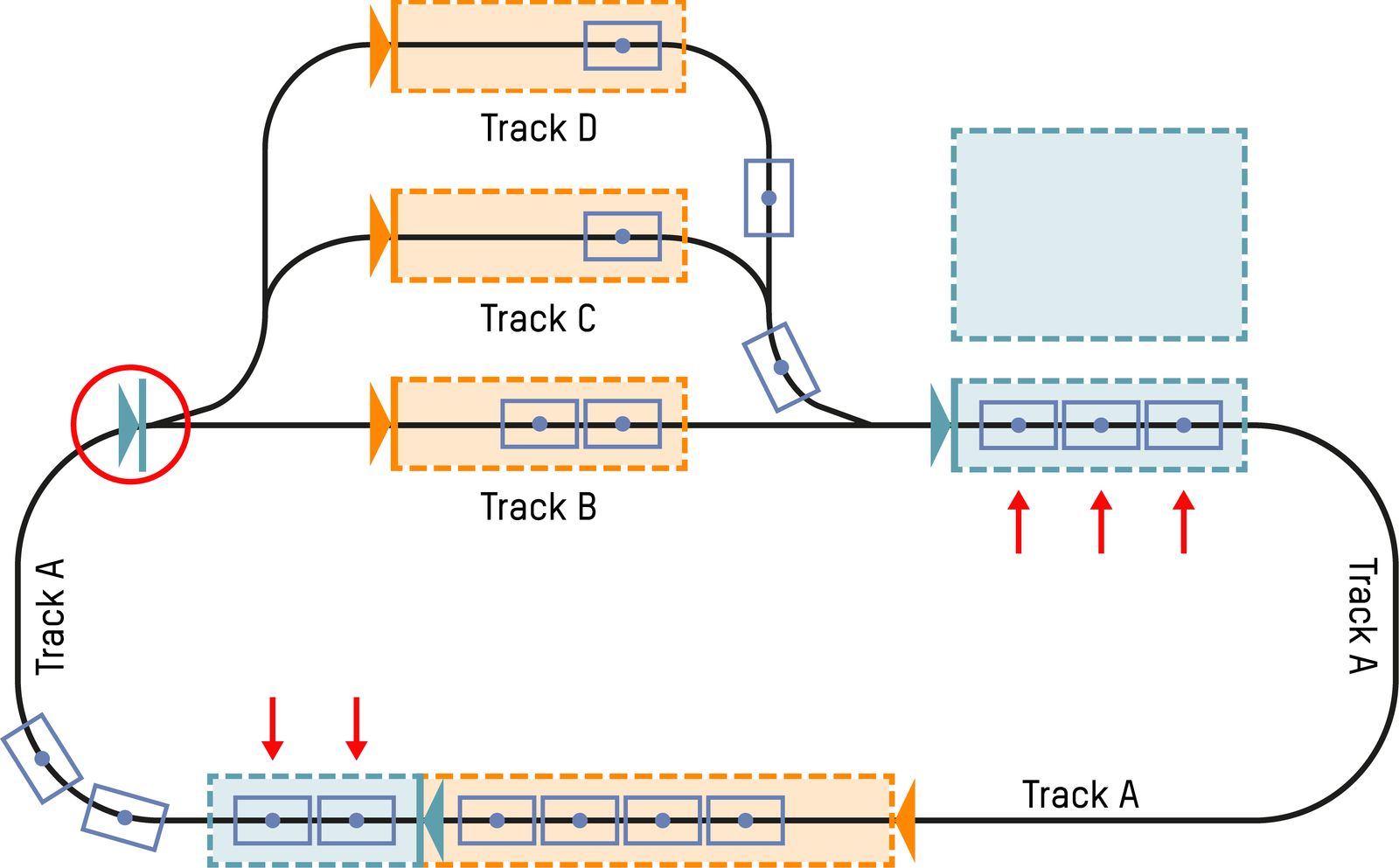
mapp Trak предлагает ключевой функционал ACOPOStrak "из коробки" - предотвращение столкновений, разделение и объединение потоков продукции на полной скорости и расчет оптимальных траекторий. Освободившись от необходимости беспокоиться об этих задачах, разработчики приложений экономят немало времени. Безопасность перемещения гарантируется даже для продуктов, различающихся по весу и размерам. Эти параметры продукта измеряются датчиками или могут быть заданы вручную. Приложение mapp Trak автоматически настроит управление шаттлами для предотвращения столкновений.
Процессно-ориентированное программирование
Второй фактор, который существенно упрощает процесс разработки, - процессно-ориентированный подход к программированию. С помощью mapp Trak создатель прикладного программного обеспечения описывает правила поведения шаттлов на линии. Они применяются при переходе шаттла через виртуальную точку срабатывания. Эта простая методология, основанная на концепции конечных автоматов, позволяет эффективно управлять последовательностями движений. С ACOPOStrak нет необходимости программировать оси и профили движения для каждого шаттла отдельно. Еще одним преимуществом процессно-ориентированного программирования является то, что шаттлы можно снимать и добавлять на линию, не внося изменений в прикладное программное обеспечение.
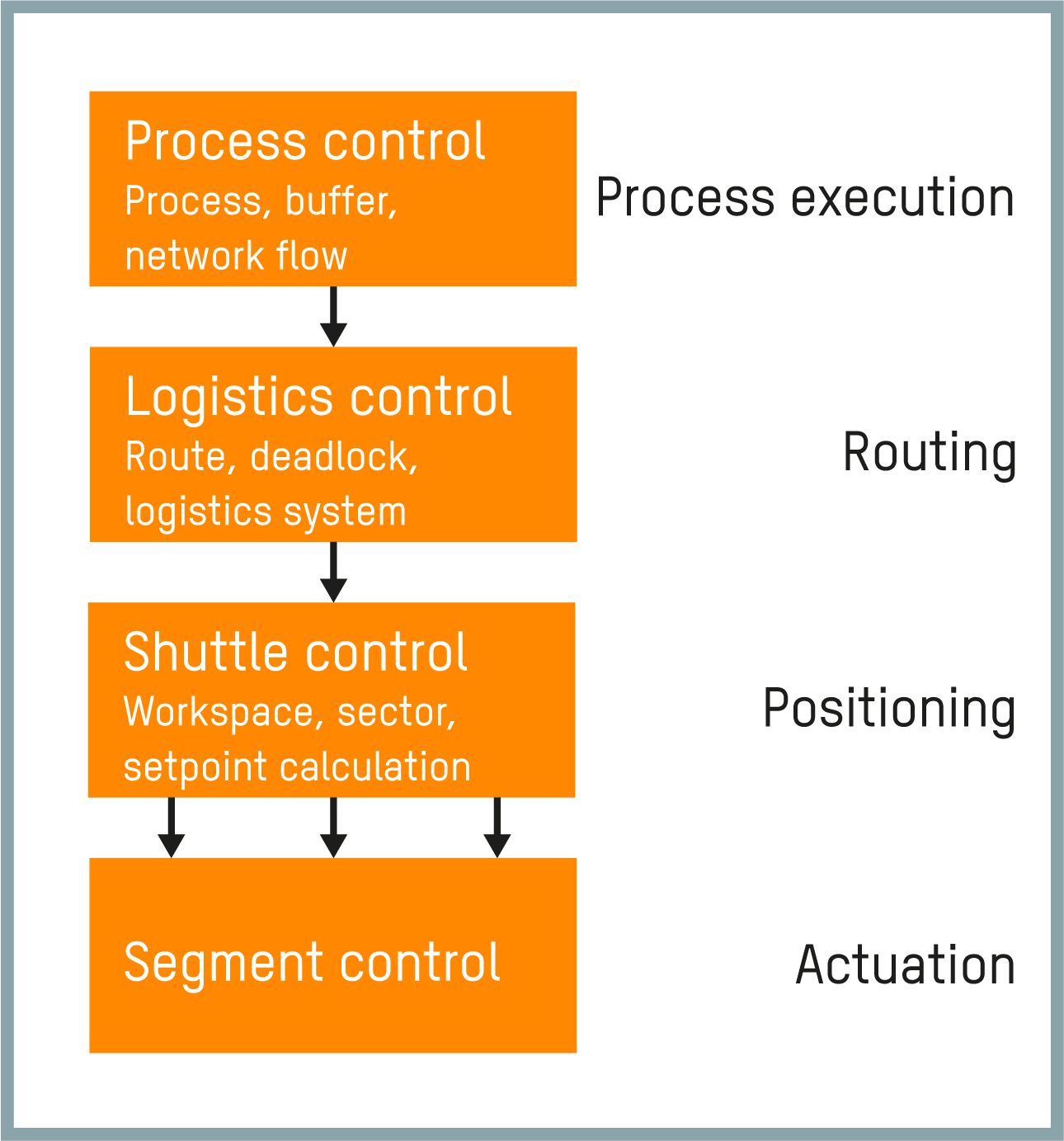
Архитектура mapp Trak
Архитектура приложения mapp Trak состоит из четырех основных уровней. Самый низкий уровень (управление сегментом), контролирует перемещение шаттлов, расположенных на соответствующем сегменте.
На следующем уровне (управление шаттлом) вычисляются такие параметры, как заданные значения положения шаттла. Именно на этом уровне шаттлы связываются с внешней осью или с другими шаттлами, например при помощи функциональных блоков PLC. Также этот уровень отвечает за добавление и удаление шаттлов с линии - например, когда ACOPOStrak используется в сочетании с обычными конвейерными лентами или если шаттлы добавляются и удаляются людьми или роботами.
Программные элементы на третьем уровне (логистический контроль) обеспечивают автоматическую маршрутизацию от одной станции обработки к другой.
Четвертый уровень отвечает за управление процессом. Этот уровень также представляет собой программный интерфейс, описывающий технологический процесс для инженеров-программистов.
Пакет mapp Services является частью программной платформы mapp Technology. Готовые к использованию модульные mapp-приложения существенно сокращают сроки и стоимость разработки ПО. Все mapp-приложения автоматически обмениваются между собой данными, что значительно упрощает программирование. Кроме того, портфель mapp-приложений постоянно растет. Узнайте больше!
