Внедрение робототехники еще никогда не было таким легким и удобным
Приложение mapp Robotics упрощает внедрение и использование роботов в производстве. Оно предоставляет целый ряд инструментов и функций, которые позволят разработчикам создавать и развертывать любые типы кинематических систем с минимальными усилиями.
Увеличение производительности

Уменьшение расходов
mapp Robotics поддерживает стандартное аппаратное обеспечение для систем управления. Вы можете управлять несколькими роботами, используя один единственный ПЛК

Объединяйте систему управления и робототехнику
mapp Robotics полностью интегрируется в приложение системы управления, а значит полностью синхронизируется с ней с микросекундной точностью.

Интеграция с Ваши Ноу-хау
Приложение mapp Robotics можно комбинировать с программами, написанными на C/C++, языках IEC61131, G-code или с пользовательскими командами.

Программирование робототехники еще не было настолько простым
Предварительно сконфигурированные компоненты mapp Robotics позволяют реализовать управление робототехникой очень легко и удобно.
mapp Robotics - Извлеките максимальную выгоду из Вашей машины

Библиотека для робототехники
Библиотека MpRobotics упрощает внедрение робота в приложение. Пользователь может создать программу для управления роботом и заставить перемещаться его от точки-к-точке, линейно или в импульсном режиме, не написав ни строчки программного кода. Для большинства моделей роботов готовые к использованию конфигурации можно применить, просто перетащив их из панели. Существуют также шаблоны механотронных решений, которые необходимо настроить для работы, если требуется управление для прочих моделей.

Прикладная программа для робототехники
У пользователей есть возможность использовать любой, предпочитаемый ими метод программирования. Готовые к использованию компоненты mapp Robotics можно комбинировать с функциональными блоками PLCopen Part 4, языками IEC 61131, C/C++ и G-code. Даже пользовательские языки можно использовать. Сложные программные последовательности и приложения обработки могут быть автоматически сгенерированы из CAD/CAM систем или созданы при помощи программирования робота путём обучения, а затем встроены в решение системы управления.

Инструменты
Функция "Tools" делает использование и управление инструментами значительно проще и удобнее, чем прежде. Размеры и положение инструмента можно сохранить, а при смене инструмента получить их обратно. Также эти данные можно даже добавить во время эксплуатации. Таким образом они будут использоваться для планирования маршрута и кинематического преобразования центральной координаты инструмента. Значения массы и инерции можно настроить для каждого инструмента, чтобы в процессе управления с прямой связью (feed-forward) брать их в расчет.
Рамки
Опорные координаты (Frames) используются для определения позиции и ориентации в координатной системе в рабочем пространстве робота. Данные можно предварительно определить в таблицах или сконфигурировать в процессе эксплуатации. Вложенные опорные координаты (Nested frames) можно использовать для того, чтобы определять и корректировать позицию робота и обрабатываемого объекта. Движение программируются относительно обрабатывающей станции или устройства автоматической смены инструмента.

Импульсный режим управления
Функция "Jogging" или, иначе говоря режим импульсного управления, является самым простым способом управлять роботом в ручную, например чтобы откалибровать или обучить робота движению. При этом управление роботом происходит с чрезвычайно коротким временем отклика, как при помощи кнопок, так и джойстика. В процессе ручной эксплуатации все ограничивающие величины, касающиеся функциональной безопасности, такие как границы рабочего пространства, ограничение скорости движения и т.д., соблюдаются точно так же, как если бы робот использовался в автоматическом режиме.
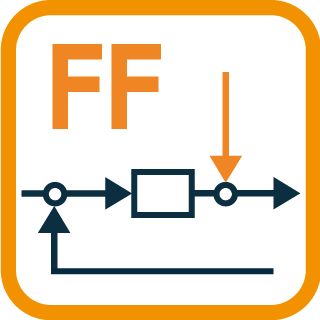
Управление с прямой связью
Управление моментом с прямой связью улучшает точность пути в процессе движений с высокой динамикой. Для всех типов робототехнических кинематических систем имеется динамическая, настраиваемая модель робота, которая используется для точных вычислений момента приводной техники с целью минимизировать отклонения от запрограммированного пути. Вкупе с высокопроизводительными приводными системами серии ACOPOS от B&R данный режим обеспечивает высокий уровень динамической точности.
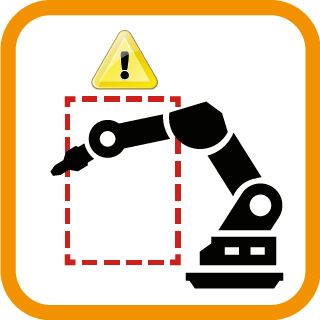
Отслеживание рабочего пространства
Отслеживание рабочего пространства задает области, в которых роботу запрещено или разрешено перемещаться. Также задать эти области можно в процессе эксплуатации. Область, в котором должен находиться робот, настраивается в качестве разрешенного рабочего пространства. Такое пространство можно дополнительно разграничить областями, которые будут запрещены для отдельных частей робота. Помимо этого можно реализовать отслеживание столкновений робота с самим собой или другими роботами.
Примеры использования:
Автономный робот-паллетайзер

Установка:
(1) | Функция Jogging позволяет управлять роботом в ручном режиме. |
|---|---|
(2) | Отслеживание рабочего пространства (Workspace monitoring) полностью предотвращает опасные ситуации при работе оператора с роботом. |
Автоматический режим:
(3) | Функция Toolsавтоматически учитывает данные, которые касаются инструмента, при расчетах движения робота. |
|---|---|
(4) | Управление моментом с прямой связью (Feed-forward ) улучшает точность пути в процессе движений с высокой динамикой. |
(5) | Опорные координаты (Frames) позволяют вычислить движения робота для других систем координат относительно друг друга. Например, паллета может иметь свою собственную систему координат, которая перемещается внутри системы координат робота. |
Пакет mapp Services является частью программной платформы mapp Technology. Готовые к использованию модульные mapp-приложения существенно сокращают сроки и стоимость разработки ПО. Все mapp-приложения автоматически обмениваются между собой данными, что значительно упрощает программирование. Кроме того, портфель mapp-приложений постоянно растет. Узнайте больше!
