Aperçu des combinaisons moteur-réducteur et des rapports de réduction
Aperçu des combinaisons moteur-réducteur et des rapports de réduction
8GM40 | 8GM50 | |||||
|---|---|---|---|---|---|---|
Taille du réducteur | 40 | 60 | 80 | 50 | 70 | 90 |
Moteur | ||||||
8LVB13 n = 1500 tr/min | Oui | - | - | Oui | - | - |
8LVB13 n = 1500 tr/min avec frein | Oui | - | - | Oui | - | - |
8LVB13 n = 3000 tr/min | Oui | - | - | Oui | - | - |
8LVB13 n = 3000 tr/min avec frein | Oui | - | - | Oui | - | - |
8LVB22 n = 1500 tr/min | - | Oui | - | - | Oui | - |
8LVB22 n = 1500 tr/min avec frein | - | Oui | - | - | Oui | - |
8LVB22 n = 3000 tr/min | - | Oui | - | - | Oui | - |
8LVB22 n = 3000 tr/min avec frein | - | Oui | - | - | Oui | - |
8LVB23 n = 1500 tr/min | - | Oui | - | - | Oui | - |
8LVB23 n = 1500 tr/min avec frein | - | Oui | - | - | Oui | - |
8LVB23 n = 3000 tr/min | - | Oui | - | - | Oui | - |
8LVB23 n = 3000 tr/min avec frein | - | Oui | - | - | Oui | - |
8LVB33 n = 1500 tr/min | - | - | Oui | - | - | Oui |
8LVB33 n = 1500 tr/min avec frein | - | - | Oui | - | - | Oui |
8LVB33 n = 2100 tr/min | - | - | Oui | - | - | Oui |
8LVB33 n = 2100 tr/min avec frein | - | - | Oui | - | - | Oui |
Rapports disponibles (iii)
Réducteurs planétaires pour montage direct sur moteur – Code de commande (iii) | ||
|---|---|---|
Gammes de réducteurs | 1 étage | 2 étages |
8GM40 | 003, 004, 005, 008, 010 | 009, 012, 015, 016, 020, 025, 032, 040, 064, 100 |
8GM50 | 003, 004, 005, 008, 010 | 009, 012, 015, 016, 020, 025, 032, 040, 064, 100 |
Type de refroidissement/construction
Type de refroidissement/construction
Les combinaisons moteur-réducteur 8LVB sont auto-refroidies et extrêmement compactes grâce au montage direct du réducteur.
Code valide : B
Taille (c)
Taille (c)
Les combinaisons moteur-réducteur 8LVB sont disponibles en trois tailles différentes (1, 2 et 3). Elles diffèrent les unes des autres par les dimensions de leur bride et par leur puissance nominale. Les différentes tailles sont indiquées par un chiffre (c) dans la référence produit. Plus ce chiffre est grand, plus la bride est grande et plus la puissance nominale du moteur est élevée.
Type de refroidissement / Construction | Tailles disponibles | ||
|---|---|---|---|
1 | 2 | 3 | |
B | Oui | Oui | Oui |
Codes valides : 13, 22, 23, 33
Longueur (d)
Longueur (d)
Le moteur intégré dans la combinaison moteur-réducteur 8LVB est disponible en deux longueurs différentes. Les dimensions de leur bride sont identiques. Ils ne diffèrent l'un de l'autre que par leur puissance nominale. Les différentes longueurs sont indiquées par un chiffre (d) dans la référence produit.
Longueurs | Tailles disponibles | ||
|---|---|---|---|
1 | 2 | 3 | |
2 | --- | Oui | --- |
3 | Oui | Oui | Oui |
Codes valides : 13, 22, 23, 33
Système codeur (ee)
Système codeur (ee)
Le codeur est indiqué dans la référence produit sous la forme d’un code à 2 chiffres (ee).
Taille/longueur | Code de commande (ee)/disponibilité des codeurs moteur | |||
|---|---|---|---|---|
R0 | B1 | B8 | B9 | |
8LVx13 | Oui | Oui | --- | --- |
8LVx22 | Oui | Oui | Oui | Oui |
8LVx23 | Oui | Oui | Oui | Oui |
8LVx33 | Oui | Oui | Oui | Oui |
Généralités
Les moteurs de la gamme 8LV sont dotés de codeurs EnDat ou de resolvers. Le codeur est indiqué dans la référence produit sous la forme d’un code à 2 chiffres (ee).
Un resolver est un système codeur analogique. Les resolvers sont particulièrement résistants aux vibrations et aux températures de fonctionnement élevées. Leur inconvénient réside dans leur précision limitée, de 6 à 10 arcmin. Par ailleurs, ils n’offrent pas de solution multitour.
Les codeurs digitaux utilisent un protocole de transfert série, appelé EnDat. Le protocole EnDat est un standard reconnu intégrant les avantages de la mesure de position absolue et incrémentale et offrant également une mémoire de paramètres accessible en lecture/écriture dans le codeur. B&R intègre la plaque signalétique embarquée dans la mémoire du codeur. Ces données et les systèmes ACOPOS de B&R constituent une solution d’entraînement plug-and-play. Avec les modèles monotour, la mesure de position absolue peut être effectuée en un tour. Avec la mesure de position absolue, aucune procédure de mise en référence n’est nécessaire. Pour les applications où le moteur réalise plusieurs tours pour le positionnement, un codeur multitour peut être utilisé afin d’enregistrer jusqu’à 65 535 tours. Une solution utilisant un codeur monotour avec procédure de mise en référence est également possible.
Resolver
Les resolvers intégrés aux moteurs sont des resolvers RE-15-1-J04.
Type de codeur/code de commande (ee) | |
|---|---|
R0 | |
Précision | 10 minutes d'angle |
Vibration pendant le fonctionnement | ≤ 500 m/s² |
Choc durant l’exploitation | ≤ 1 000 m/s² |
Codeur EnDat 2.2
Avec le protocole avancé et entièrement numérique EnDat 2.2, les positions sont générées directement dans le codeur et échangées en série avec le servovariateur. Ce mode de transmission est très fiable au regard des perturbations liées à l’environnement et est même certifié pour les applications de sécurité.
Les servovariateurs numériques et les boucles de régulation de position nécessitent une transmission rapide et hautement sécurisée des données depuis les systèmes de mesure. D’autres données telles que les paramètres spécifiques du variateur, les tables de correction, etc., doivent également être disponibles. Afin de garantir une sécurité système élevée, les systèmes de mesure doivent être intégrés aux routines de détection d’erreurs pour pouvoir réaliser les diagnostics.
L’interface EnDat de HEIDENHAIN est une interface digitale bidirectionnelle destinée aux systèmes de mesure. Elle peut non seulement délivrer les valeurs de position de systèmes de mesure incrémentaux ou absolus, mais aussi interroger les informations mémorisées dans le système de mesure, les actualiser ou y enregistrer d’autres informations. Grâce au transfert des données en série, 4 lignes de signaux suffisent. Les données sont transmises de manière synchrone par rapport au signal d’horloge donné par l’électronique consécutive. Le type de transmission (valeurs de position, paramètres, diagnostics, etc.) est sélectionné à l’aide de commandes de mode envoyées au système de mesure par l’électronique consécutive.
Type de codeur/code de commande (ee) | |||
|---|---|---|---|
B1 | B8 | B9 | |
Principe de fonctionnement | Inductif | ||
Protocole EnDat | EnDat 2.2 | ||
Monotour/multitour | M | S | M |
Batterie de secours | Oui | --- | |
Tours | 65536 | 1 | 4096 |
Résolution [bits monotour/bits multitour] | 18/16 | 19/0 | 19/12 |
Précision [''] | 120 | ||
Fréquence de commutation ≥ [kHz] | Position digitale dans le codeur | ||
Vibration pendant le fonctionnement – stator Max [m/s2] | 300 | 400 | |
Vibration pendant le fonctionnement – rotor Max [m/s2] | 300 | 600 | |
Choc durant l’exploitation, max. [m/s2] | 1000 | 2000 | |
Référence produit du fabricant | EBI 1135 | ECI 1119 FS | EQI 1131 FS |
Site du fabricant | www.heidenhain.de | ||
Codes valides : R0, B1, B8, B9
Rapports disponibles (iii)
Rapports disponibles (iii)
Réducteurs planétaires pour montage direct sur moteur – Code de commande (iii) | ||
|---|---|---|
Gammes de réducteurs | 1 étage | 2 étages |
8GM40 | 003, 004, 005, 008, 010 | 009, 012, 015, 016, 020, 025, 032, 040, 064, 100 |
8GM50 | 003, 004, 005, 008, 010 | 009, 012, 015, 016, 020, 025, 032, 040, 064, 100 |
Codes valides : 003, 004...100, voir table
Arbre de sortie (jj)
Arbre de sortie (jj)
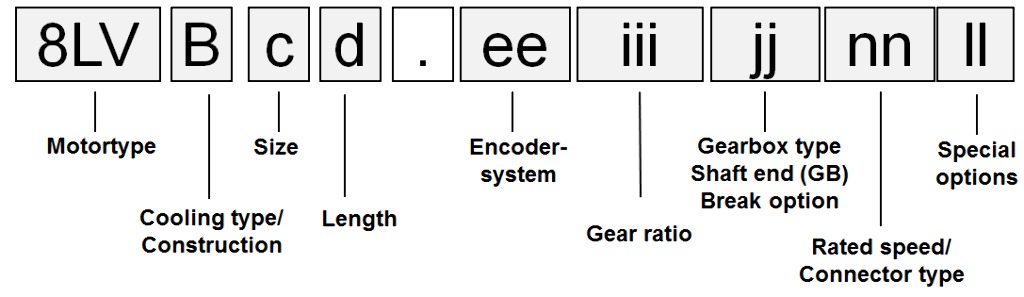
Les combinaisons moteur-réducteur de la gamme 8LVB peuvent être fournies avec un arbre lisse ou claveté.
| Arbre lisseUne extrémité d’arbre lisse est utilisée pour obtenir une liaison arbre-moyeu serrée et garantit une absence totale de jeu entre l’arbre et le moyeu, ainsi qu’un fonctionnement sans à-coups. L’extrémité de l’arbre est pourvue d’un orifice central fileté. | 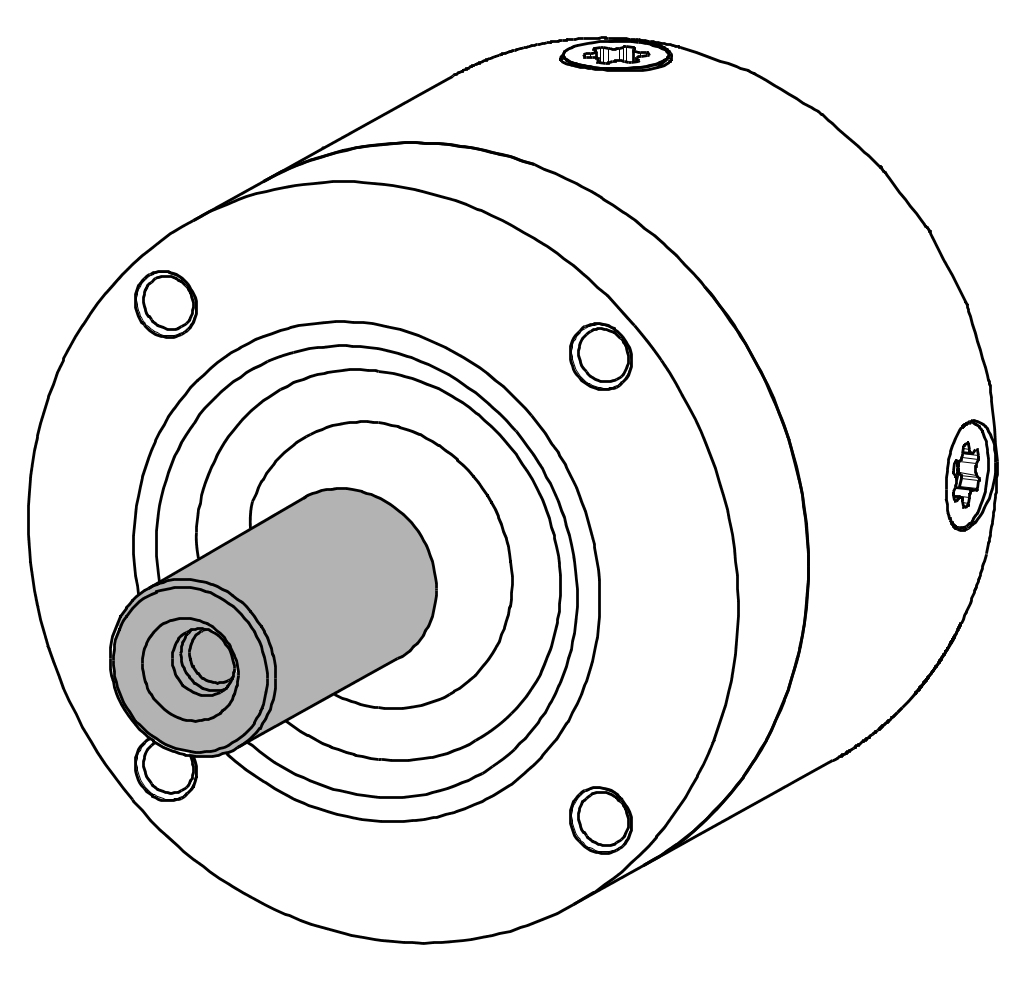 |
| Arbre clavetéL’arbre claveté peut être utilisé pour un transfert de couple ajusté présentant de faibles contraintes au niveau de la liaison arbre-moyeu, ainsi que pour gérer les couples dont la direction est constante. Les rainures de clavette pour les réducteurs de la gamme 8LVB correspondent à celles de forme N1 selon DIN 6885-1. L’extrémité de l’arbre est pourvue d’un orifice central fileté permettant de monter des actionneurs munis de disques en bout d’arbre. | 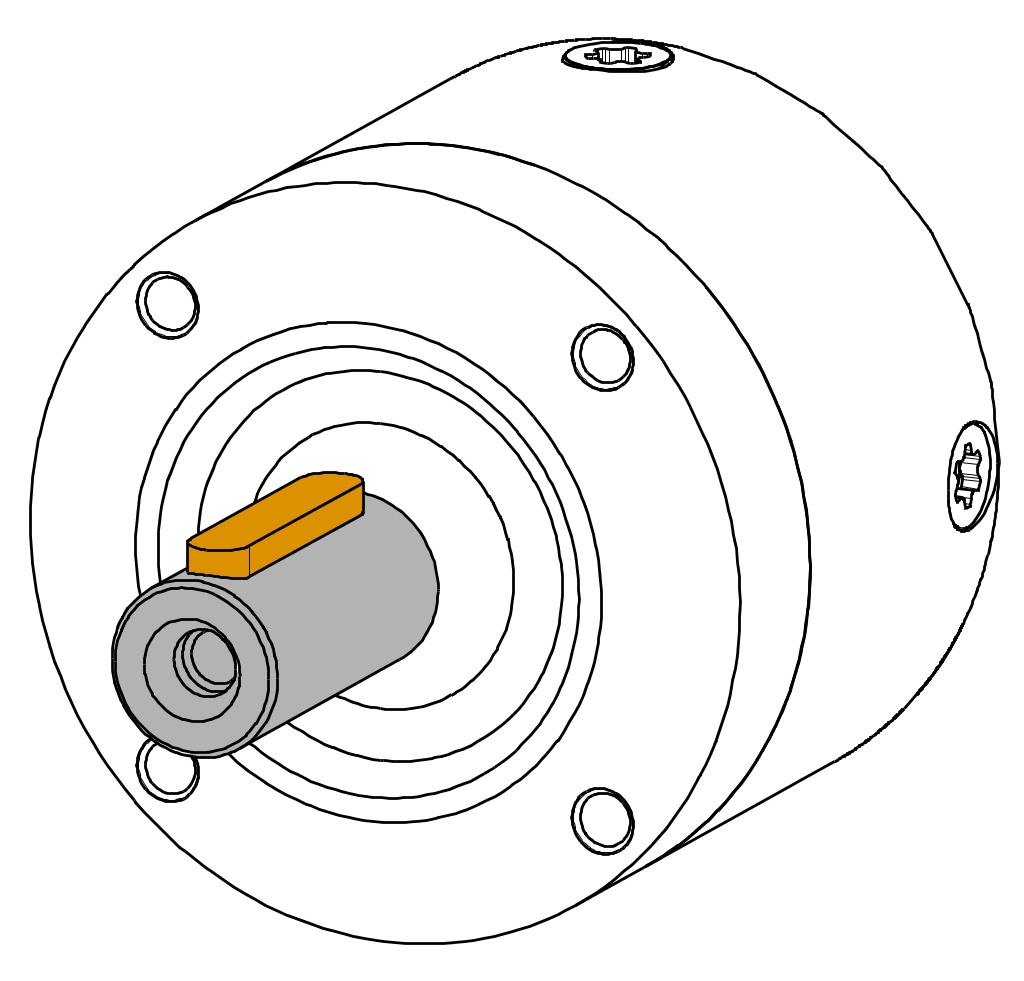 |
Codes valides : voir la table « détermination du code de commande pour les options de l’appareil »
Frein de maintien (jj)
Frein de maintien (jj)
Tous les moteurs de la gamme 8LV peuvent aussi être pourvus d’un frein de maintien. Il sert à maintenir l’arbre moteur lorsque le moteur est hors tension.
Taille du moteur | |||
|---|---|---|---|
1 | 2 | 3 | |
Couple de maintien du frein MBr [Nm] | 0.35 | 2.2 | 3.2 |
Charge connectée POn [W] | 8 | 8.4 | 13.4 |
Vitesse maximale nmax [tr/min] | 6000 | 12000 | 12000 |
Courant d’alimentation Ion [A] | 0.33 | 0.35 | 0.56 |
Tension d’alimentation Uon [V] | 24 VDC +6 % / -10 % | 24 VDC +6 % / -10 % | 24 VDC +6 % / -10 % |
Moment d'inertie JBr [kgcm²] | 0.013 | 0.07 | 0.38 |
Poids mBr [kg] | 0.1 | 0.16 | 0.29 |
Codes valides : voir la table « détermination du code de commande pour les options de l’appareil »
Détermination du code de commande pour les options de l’appareil (jj)
Détermination du code de commande pour les options de l’appareil (jj)
Les codes (jj) des options moteur sont les suivants :
Réducteurs 8GM40 | Option moteur Frein de maintien | Extrémité d’arbre | Code de commande (jj) |
|---|---|---|---|
--- | Lisse | S0 | |
--- | Claveté | S1 | |
Oui | Lisse | S4 | |
Oui | Claveté | S5 |
Réducteurs 8GM50 | Option moteur Frein de maintien | Extrémité d’arbre | Code de commande (jj) |
|---|---|---|---|
--- | Lisse | L0 | |
--- | Claveté | L1 | |
Oui | Lisse | L4 | |
Oui | Claveté | L5 |
Vitesse nominale/type de connexion (nn)
Vitesse nominale/type de connexion (nn)
Le premier chiffre (nn) du code à deux chiffres (nn) est la vitesse nominale. Le second chiffre (nn) est le type de raccordement.
La vitesse nominale (nn) du moteur est spécifiée en tant que classe de vitesse dans le code de commande. La classe de vitesse est divisée en segments de 500 [tr/min] et commence à A = 500 [tr/min] pour une utilisation à 80 VCC. (Exceptions : vitesse nominale de 950 tr/min en classe B = 1000 tr/min et vitesse nominale de 2100 tr/min en classe D = 2000 tr/min.)
Le type de raccordement (nn) du moteur correspond dans le code de commande à nW pour un connecteur coudé double incorporé et nS pour une solution monocâble (hybride).
 Connecteur coudé double incorporé (nW) |  Solution monocâble (nS) |
Combinaisons disponibles
Taille/longueur | Vitesses nominales nN [tr/min] disponibles pour un fonctionnement à 80 VCC | ||
|---|---|---|---|
1500 | 2100 | 3000 | |
Code de la classe de vitesse nominale (nn) (code pour la classe de vitesse nominale et le type de raccordement) | |||
Cn (CW/CS) | Dn (DW/DS) | Fn (FW/FS) | |
8LVB131) | Oui | --- | Oui |
8LVB22 | Oui | --- | Oui |
8LVB23 | Oui | --- | Oui |
8LVB33 | Oui | Oui | --- |
| 1) | Tous les types de codeurs moteur ne sont pas disponibles pour cette taille. Consultez le tableau des codeurs moteur disponibles. |
Exemple : Le code à deux chiffres (nn) pour une vitesse nominale de 1500 nN [tr/min] est soit CW pour le connecteur coudé double incorporé, soit CS pour la solution monocâble (hybride).
Options moteur spéciales (ll)
Options moteur spéciales (ll)
Aucune option moteur spéciale n’est actuellement disponible pour les motoréducteurs 8LVB. Code valide : 00
Exemple de commande 1
Exemple de commande 1
Un servo-motoréducteur de type 8LVB 13 avec une vitesse nominale de 1500 tr/min a été choisi pour une application. Le moteur doit être équipé d’un frein de maintien et d’un codeur EnDat (B1). Le réducteur doit avoir un rapport de réduction de i = 010 et l’extrémité de l’arbre doit être clavetée. Le raccordement doit se faire par un connecteur coudé double incorporé.
Le code (ee) pour le système de codeur est B1.
Le code (iii) pour le rapport de réduction est 010.
Le code pour les réducteurs standard avec arbre claveté est S5.
Le code pour le frein de maintien est 5 (déjà inclus dans le code S5).
Le code pour une vitesse nominale (nn) de 1500 tr/min est C.
Le code pour le connecteur coudé double incorporé (nn) est W.
La référence produit pour la combinaison moteur-réducteur requise est 8LVB13.B1010S5CW00.
Exemple de commande 2
Exemple de commande 2
Un servo-motoréducteur de type 8LVB 33 avec une vitesse nominale de 2100 tr/min a été choisi pour une application. Il doit être dépourvu de frein de maintien, et équipé d’un codeur EnDat B8. Le réducteur doit avoir un rapport de réduction de i = 020 et l’extrémité de l’arbre doit être lisse. Le réducteur choisi est le 8GM50. Le raccordement doit se faire par une solution monocâble (hybride).
Le code (ee) pour le système de codeur est B8.
Le code (iii) pour le rapport de réduction est 020.
Le code pour les réducteurs 8GM50 avec arbre lisse est L0.
Le code pour l’option moteur sans frein de maintien est 0 (déjà inclus dans le code L0).
Le code pour une vitesse nominale (nn) de 2100 tr/min est D (2100 tr/min relève de la classe de vitesse D = 2000 tr/min).
Le code pour la solution monocâble (hybride) (nn) est S.
La référence produit pour la combinaison moteur-réducteur requise est 8LVB33.R0020L0DS00.