8LW | b | c | d | . | ee | nnn | ff | gg | - | h | ||||||||||||||||
Type de refroidissement/construction | ||||||||||||||||||||||||||
Taille | ||||||||||||||||||||||||||
Longueurs | ||||||||||||||||||||||||||
Codeur du moteur | ||||||||||||||||||||||||||
Vitesse nominale | ||||||||||||||||||||||||||
Options moteur | ||||||||||||||||||||||||||
Options moteur spéciales | ||||||||||||||||||||||||||
Version moteur | ||||||||||||||||||||||||||
L'obtention d'informations sur les combinaisons possibles n'est possible que dans certains cas exceptionnels.
Les informations sur les combinaisons possibles se trouvent sous Configurateur CAO.
Type de refroidissement/construction (b)
Type de refroidissement/construction (b)
8LW | b | c | d | . | ee | nnn | ff | gg | - | h | |||||||||||
 | Les moteurs 8LW ne sont disponibles qu'avec auto-refroidissement de type A (8LWA). Ces moteurs ont une forme longue et effiliée et doivent être raccordés à la machine à l'aide de la bride de montage qui sert également de surface de refroidissement. Le type de refroidissement correspond au caractère (b) dans la référence produit. |
Type de refroidissement (b) | Connectique (voir options moteur) | |
|---|---|---|
8LWA | Auto-refroidissement | Connecteur double coudé incorporé |
Solution mono-câble (hybride) - Coudé | ||
Solution mono-câble (hybride) - Droit | ||
Taille (c)
Taille (c)
8LW | b | c | d | . | ee | nnn | ff | gg | - | h | |||||||||||
 | Les servomoteurs 8LWA sont disponibles dans différentes tailles (1, 2, 3). Ils diffèrent les uns des autres par leurs dimensions (et notamment les dimensions de la bride) et par leur puissance nominale. Les tailles correspondent au caractère (c) dans la référence produit. Plus ce chiffre est grand, plus la bride est grande et plus la puissance nominale du moteur est élevée. |
Disponibilité
Tailles disponibles (c) | |||
|---|---|---|---|
8LWA1 | 8LWA2 | 8LWA3 | |
8LWA | Oui | Oui | Oui |
Longueur (d)
Longueur (d)
8LW | b | c | d | . | ee | nnn | ff | gg | - | h | |||||||||||
 | Les servomoteurs 8LWA sont disponibles dans différentes tailles. Les différents modèles présentent ainsi différentes puissances avec des brides ayant toutes les mêmes dimensions. Les longueurs correspondent au chiffre d dans la référence produit. Plus ce chiffre est grand, plus le moteur est long. |
Disponibilité
Longueurs disponibles (d) | ||
|---|---|---|
8LWAx2 | 8LWAx3 | |
8LWA1 | --- | Oui |
8LWA2 | Oui | Oui |
8LWA3 | --- | Oui |
Codeurs embarqués (ee)
Codeurs embarqués (ee)
8LW | b | c | d | . | ee | nnn | ff | gg | - | h | |||||||||||
Les moteurs disponibles comportent un codeur EnDat ou un codeur resolver. Le codeur utilisé correspond au code à 2 chiffres (ee) dans la référence produit.
Resolver
Un resolver est un codeur analogique. Les resolvers sont particulièrement résistants aux vibrations et aux hautes températures de fonctionnement. Ils présentent l'inconvénient d'avoir une précision limitée (de 6 à 10 arcminutes). Il n'existe pas de variante multi-tours avec les resolvers.
Caractéristiques techniques | Resolver / Code de commande (ee) |
|---|---|
R0 | |
Type | RE-15-1-J04 |
Précision | 10 minutes d'angle |
Vibration en fonctionnement | ≤ 500 m/s² |
Choc en fonctionnement | ≤1000 m/s² |
Disponibilité | Resolvers disponibles/code de commande (ee) |
|---|---|
R0 | |
8LWA1 | Oui |
8LWA2 | Oui |
8LWA3 | Oui |
Codeur EnDat 2.2
Avec le protocole avancé et entièrement numérique EnDat 2.2, les positions sont générées directement dans le codeur et échangées en série avec le servovariateur. Ce mode de transmission est très fiable au regard des perturbations liées à l’environnement et est même certifié pour les applications de sécurité.
Caractéristiques techniques | Type de codeur/code de commande (ee) | |||
|---|---|---|---|---|
B8 | Z8 | B9 | Z9 | |
Principe de fonctionnement | Inductif | |||
Protocole EnDat | 2.2 | |||
Sûreté fonctionnelleVoir annexe B "Safety level overview for ACOPOS product family safety functions" du manuel d'utilisation SafeMOTION (MAACPMSAFEMC-ENG) disponible dans la section Téléchargements du site web de B&R. | --- | Oui | --- | Oui |
Monotour/Multitours | S | M | ||
Batterie de secours | --- | |||
Tours | 1 | 4096 | ||
Résolution [bits monotour/bits multitour] | 19/0 | 19/12 | ||
Précision [''] | ±120 | |||
Fréquence de coupure ≥ [kHz] | Pos. digitale dans le codeur | |||
Stator - Vibration en fonctionnement Max. [m/s2] | 400 | |||
Rotor - Vibration en fonctionnement Max. [m/s2] | 600 | |||
Choc max. en fonctionnement [m/s2] | 2000 | |||
Référence produit du fabricant | ECI 1119 FS EnDat22 | EQI 1131 FS EnDat22 | ||
Disponibilité | Codeurs disponibles/code de commande (ee) | |||
|---|---|---|---|---|
B8 | Z8 | B9 | Z9 | |
8LWA1 | Oui | Oui | Oui | Oui |
8LWA2 | Oui | Oui | Oui | Oui |
8LWA3 | Oui | Oui | Oui | Oui |
Vitesse nominale (nnn)
Vitesse nominale (nnn)
8LW | b | c | d | . | ee | nnn | ff | gg | - | h | |||||||||||
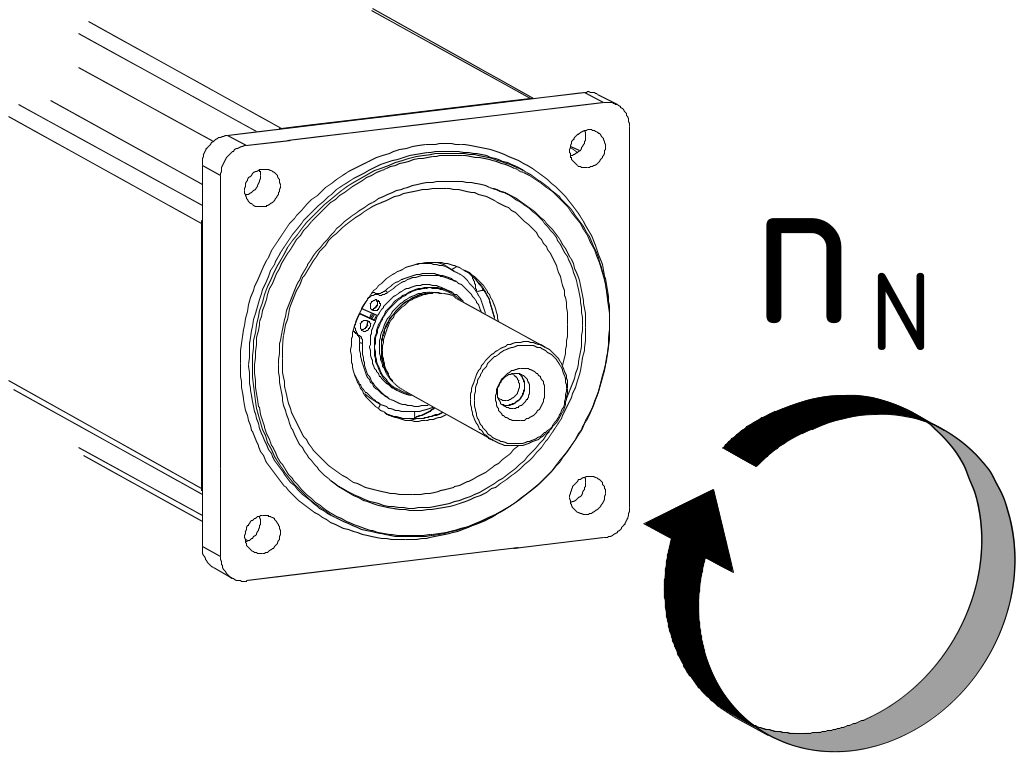 | Les servomoteurs 8LWA sont disponibles avec différentes vitesses nominales. La vitesse nominale correspond aux code à trois chiffres nnn dans la référence produit. |
Code de commande (nnn) | ||
|---|---|---|
030 | 045 | |
Vitesses nominales nN disponibles [tr/min] | 3000 | 4500 |
Disponibilité
Vitesses nominales nN disponibles [tr/min] | ||
|---|---|---|
3000 | 4500 | |
8LWA1 | --- | Oui |
8LWA2 | Oui | Oui |
8LWA3 | Oui | Oui |
Options moteur (ff)
8LW | b | c | d | . | ee | nnn | ff | gg | - | h | |||||||||||
Voir le tableau qui suit pour le code correspondant (ff) dans le code de commande.
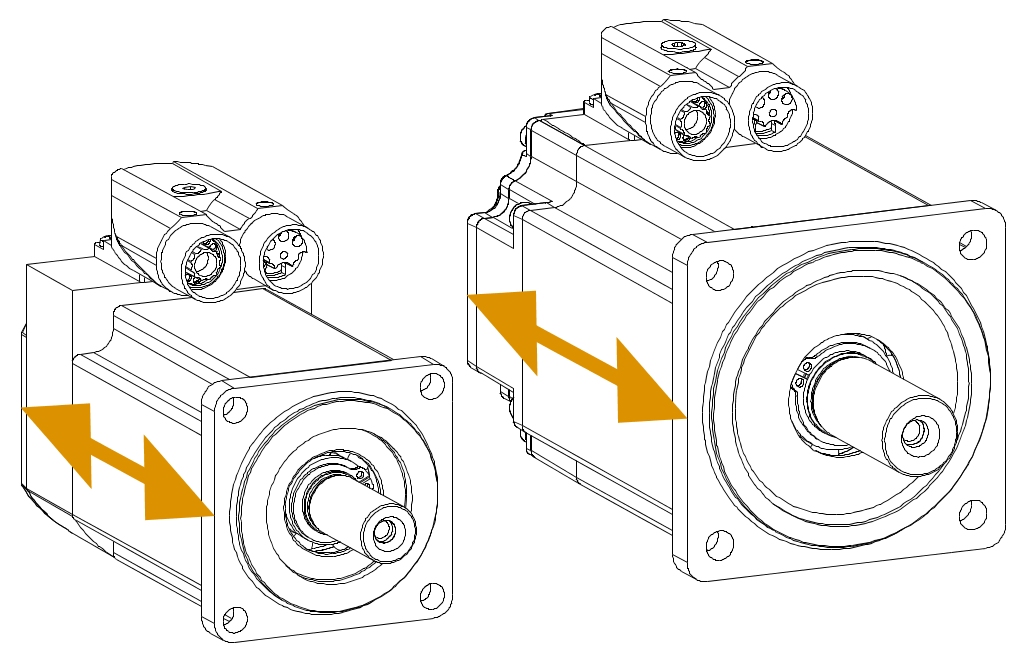
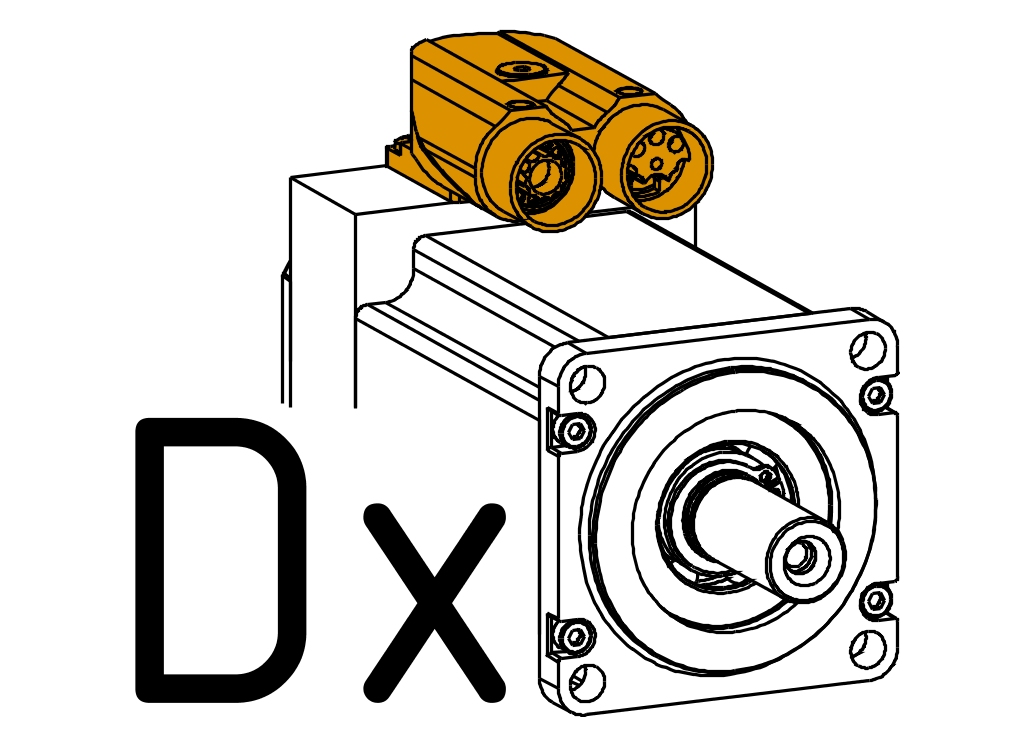
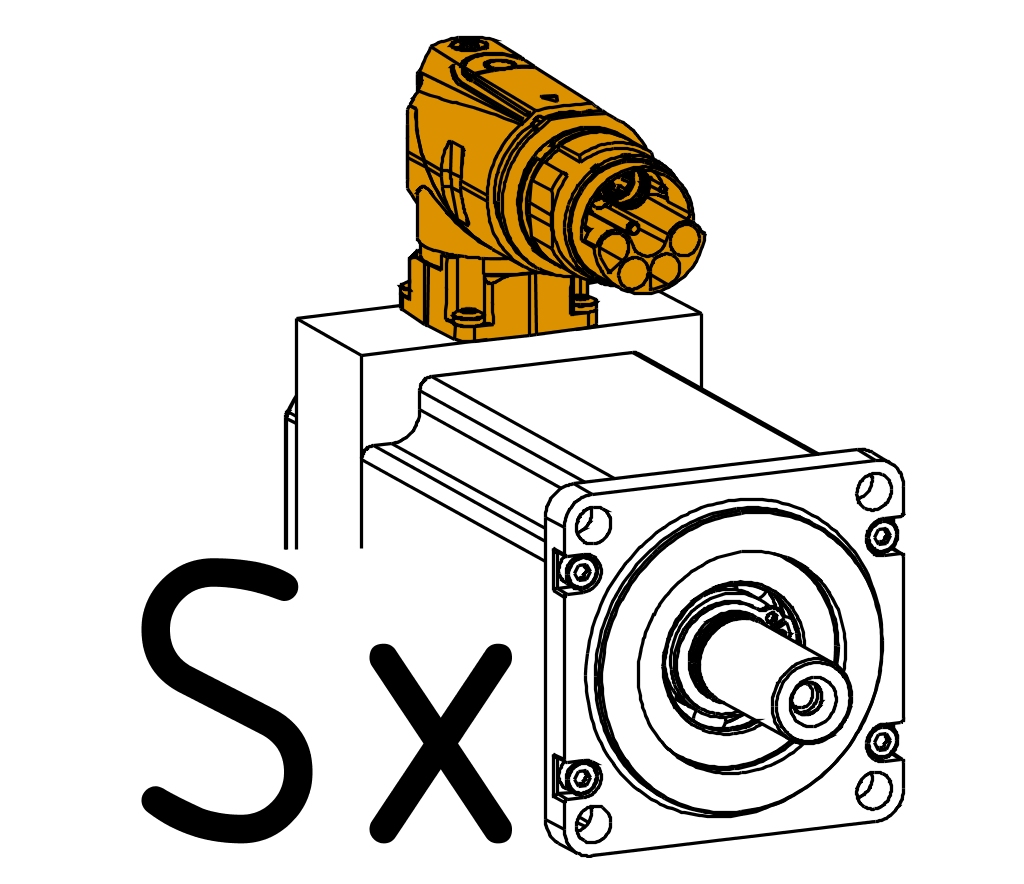
La première position dans le code (ff) définit l'orientation des connexions avec les options Dx, Sx et Ux. La deuxième position (par exemple x1, x2, x3) définit toutes les autres options moteur selon le tableau.
Connecteur coudé double incorporé (pivotant)
Câble codeur et câble de puissance : Séparés avec leurs propres connexions
Option moteur | Disponibilité | Code de commande (ff) | |||||
|---|---|---|---|---|---|---|---|
Orientation des connexions | Joint à huile | Frein de maintien | Bout d'arbre | 8LWA1 | 8LWA2 | 8LWA3 | |
 | --- | --- | Arbre lisse | Oui | Oui | Oui | D0 |
--- | --- | Arbre claveté | --- | Oui | Oui | D1 | |
--- |  | Arbre lisse | Oui | Oui | Oui | D2 | |
--- | Arbre claveté | --- | Oui | Oui | D3 | ||
Oui | --- | Arbre lisse | Oui | Oui | Oui | D6 | |
Oui | --- | Arbre claveté | --- | Oui | Oui | D7 | |
Oui | | Arbre lisse | Oui | Oui | Oui | D8 | |
Oui | Arbre claveté | --- | Oui | Oui | D9 | ||
Solution mono-câble (hybride), coudé (pivotant)
Câble de puissance et câble codeur : Combinés dans un seul câble
Option moteur | Disponibilité | Code de commande (ff) | |||||
|---|---|---|---|---|---|---|---|
Direction de raccordement | Joint à huile | Frein de maintien | Bout d'arbre | 8LWA1 | 8LWA2 | 8LWA3 | |
 | --- | --- | Arbre lisse | Oui | Oui | Oui | S0 |
--- | --- | Arbre claveté | --- | Oui | Oui | S1 | |
--- | | Arbre lisse | Oui | Oui | Oui | S2 | |
--- | Arbre claveté | --- | Oui | Oui | S3 | ||
Oui | --- | Arbre lisse | Oui | Oui | Oui | S6 | |
Oui | --- | Arbre claveté | --- | Oui | Oui | S7 | |
Oui | | Arbre lisse | Oui | Oui | Oui | S8 | |
Oui | Arbre claveté | --- | Oui | Oui | S9 | ||
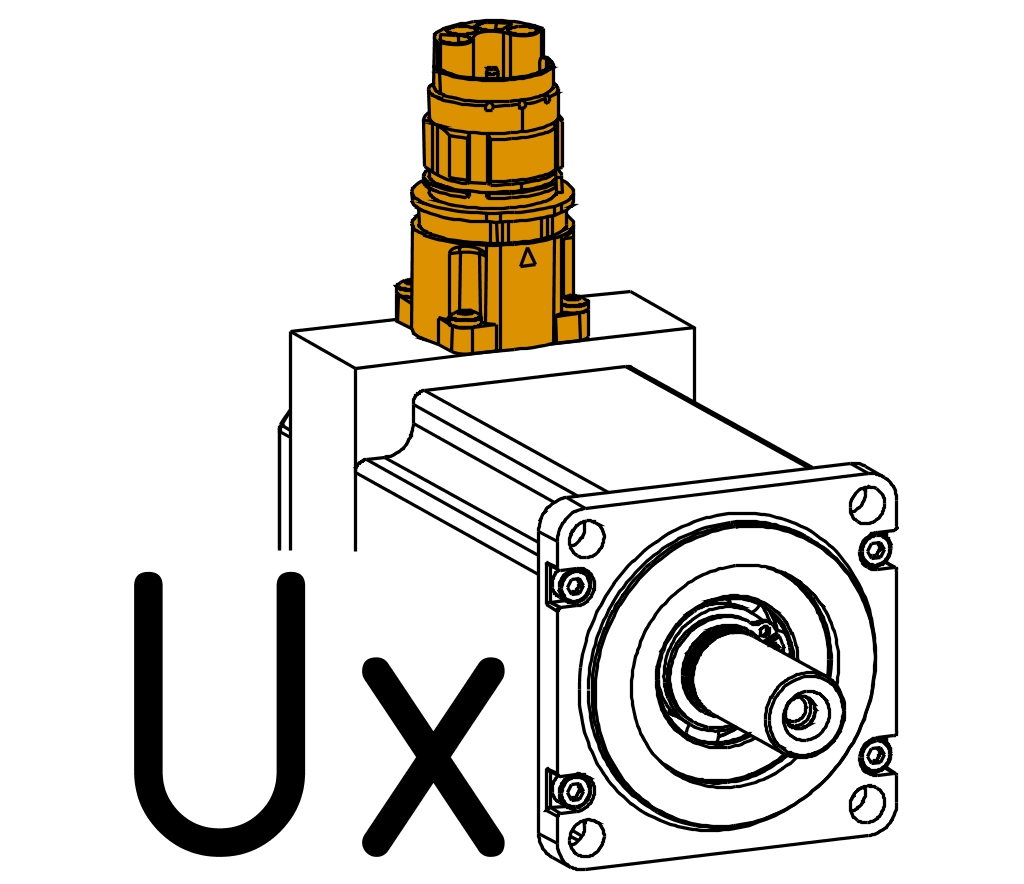
Solution mono-câble (hybride) - droit
Câble de puissance et câble codeur : Combinés dans un seul câble
Option moteur | Disponibilité | Code de commande (ff) | |||||
|---|---|---|---|---|---|---|---|
Direction de raccordement | Joint à huile | Frein de maintien | Extrémité d’arbre | 8LWA1 | 8LWA2 | 8LWA3 | |
 | --- | --- | Arbre lisse | Oui | Oui | Oui | U0 |
--- | --- | Arbre claveté | --- | Oui | Oui | U1 | |
--- | | Arbre lisse | Oui | Oui | Oui | U2 | |
--- | Arbre claveté | --- | Oui | Oui | U3 | ||
Oui | --- | Arbre lisse | Oui | Oui | Oui | U6 | |
Oui | --- | Arbre claveté | --- | Oui | Oui | U7 | |
Oui | | Arbre lisse | Oui | Oui | Oui | U8 | |
Oui | Arbre claveté | --- | Oui | Oui | U9 | ||
Direction de connexion (ff)
Direction de connexion (ff)
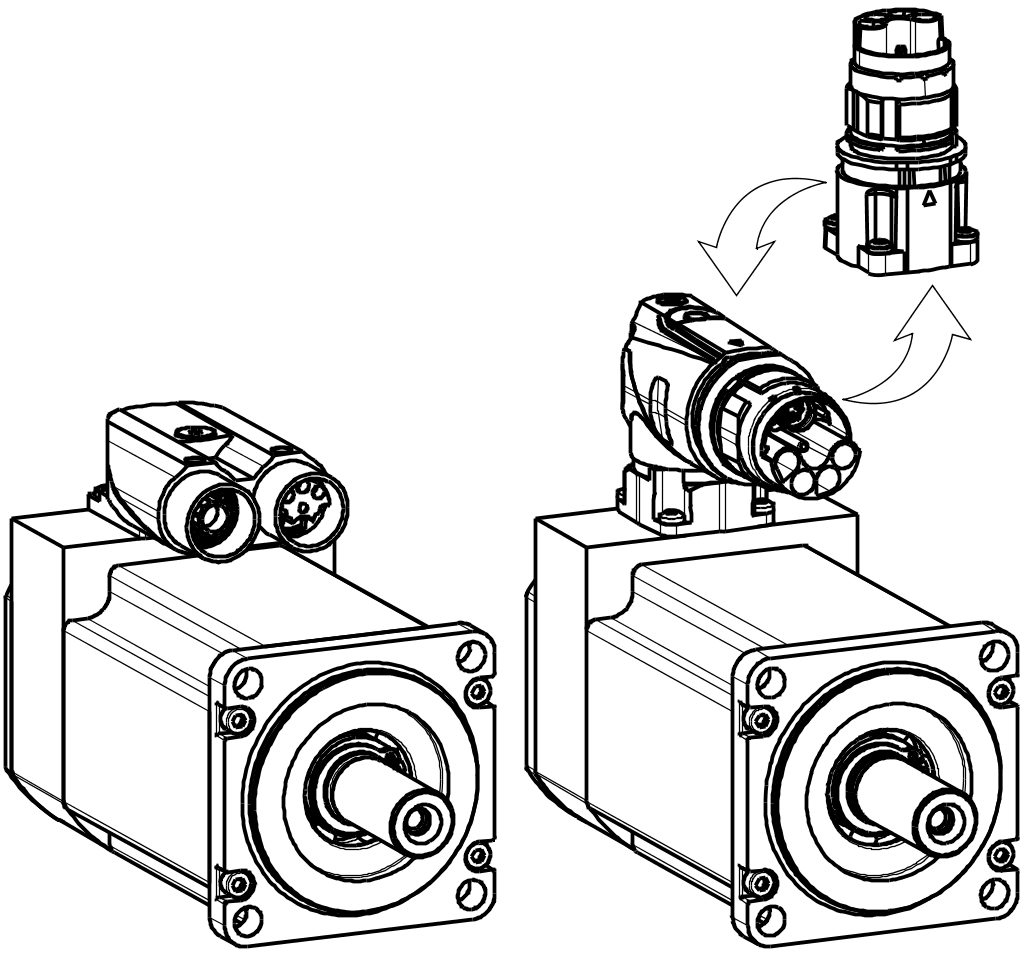
Alimentation et connexion codeur
Les servomoteurs sont disponibles avec 3 options de connexion différentes.
| Double connecteur coudé incorporé Orientation de connexion : Coudé (pivot1)) Câbles codeur et de puissance : Séparés avec leurs propres connexions  |
| Solution monocâble (hybride) Orientation de connexion Coudé (1) pivotant) Câbles codeur et de puissance Combinés dans un seul câble  |
| Solution monocâble (hybride) Orientation de connexion : Droit Câbles codeur et de puissance : Combinés dans un seul câble |
| 1) | Vérifier les spécifications d'angle et la faisabilité au regard des besoins en utilisant le configurateur CAO (cad.br-automation.com). |
Joint à huile (ff)
Joint à huile (ff)
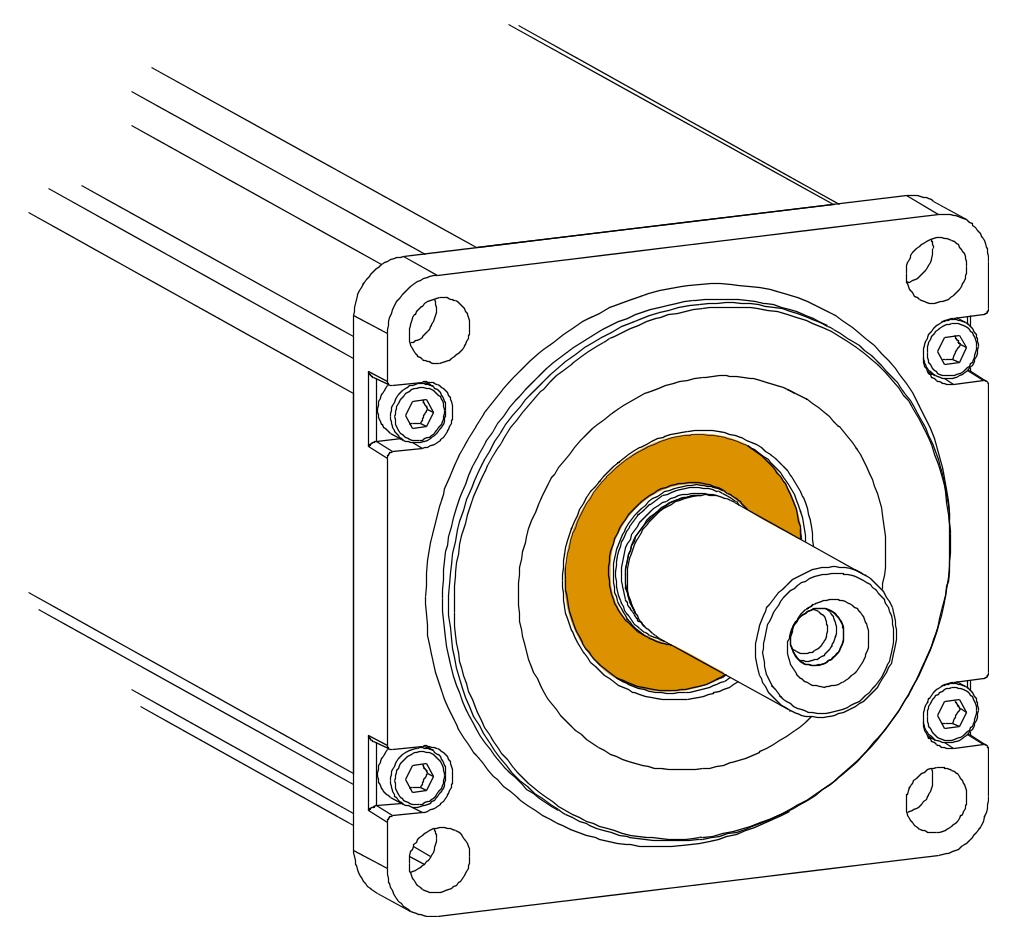 | Les servomoteurs 8LWA sont disponibles avec un joint de forme A selon DIN 3760.
|
Maintenance
Pour rester fonctionnel, le joint d'étanchéité doit être lubrifié régulièrement avec de l'huile. Un joint non lubrifié se durcit en raison de l'accroissement des dissipations thermiques dues aux frottements. La protection qu'il offre n'est alors opérante que pour la poussière.
Frein de maintien (ff)
Frein de maintien (ff)
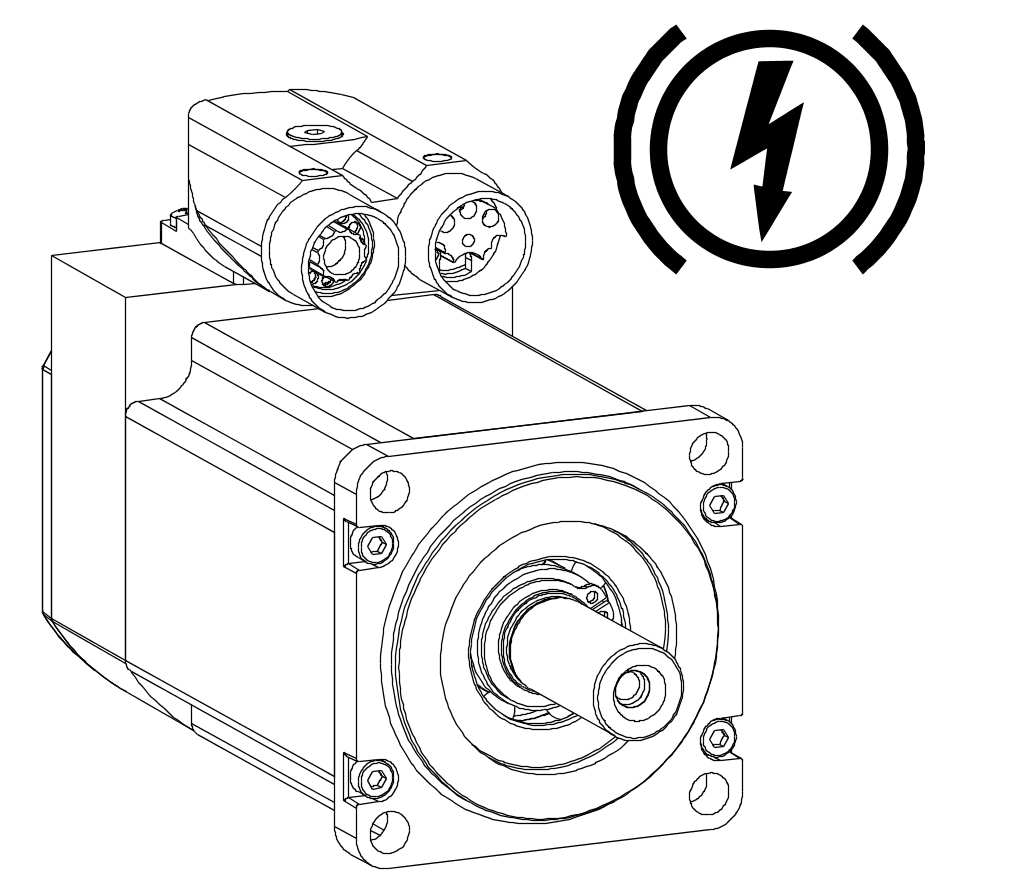 | Tous les moteurs 8LWA sont disponibles avec un frein de maintien standard. Ce dernier est monté directement derrière la bride côté A et utilisé maintenir l’arbre du moteur en position lorsque la puissance fournie au servomoteur est coupée. |
Caractéristiques techniques
8LWA1 | 8LWA2 | 8LWA3 | |
|---|---|---|---|
Couple de maintien MBr [N m] | 0,35 | 2.2 | 4,0 |
Charge connectée POn [W] | 8 | 8,2 | 13,4 |
Vitesse maximale nmax [tr/min] | 6000 | 12000 | 10000 |
Courant d’alimentation Ion [A] | 0,33 | 0,35 | 0,56 |
Tension d'alimentation UOn [VDC] | 24 (+6% / -10%) | ||
Moment d’inertie JBr [kg.cm²] | 0,013 | 0,12 | 0,38 |
Poids mBr [kg] | 0,1 | 0,19 | 0,29 |
Principe de fonctionnement
Un frein de maintien est un frein à aimant permanent. Il peut être contrôlé par le système d'entraînement de B&R. Ce type de frein présente un jeu minimal.
Le frein est conçu pour une utilisation en tant que frein de maintien. Il n'est donc pas permis de l'utiliser pour des opérations de freinage normales. Dans ces conditions d’utilisation, le frein a une durée de vie d’environ 5 000 000 cycles, un cycle correspondant à l’ouverture et à la fermeture du frein. Le freinage en charge lors d’un arrêt d’urgence est autorisé mais réduit la durée de vie du frein.
Le couple de maintien requis pour le frein est déterminé en fonction du couple réel de charge. Si les informations relatives au couple de charge sont insuffisantes, il est recommandé d’appliquer un facteur de sécurité de 2.
Le frein de maintien n'est pas conçu pour un freinage normal. Le frein de maintien n'apporte pas de protection pour le personnel. Le couple maximal du moteur est bien supérieur au couple de maintien pour le frein.
Extrémité de l’arbre (ff)
Extrémité de l’arbre (ff)
Tous les servomoteurs 8LWA ont des bouts d'arbre conformes à DIN 748.
Variantes
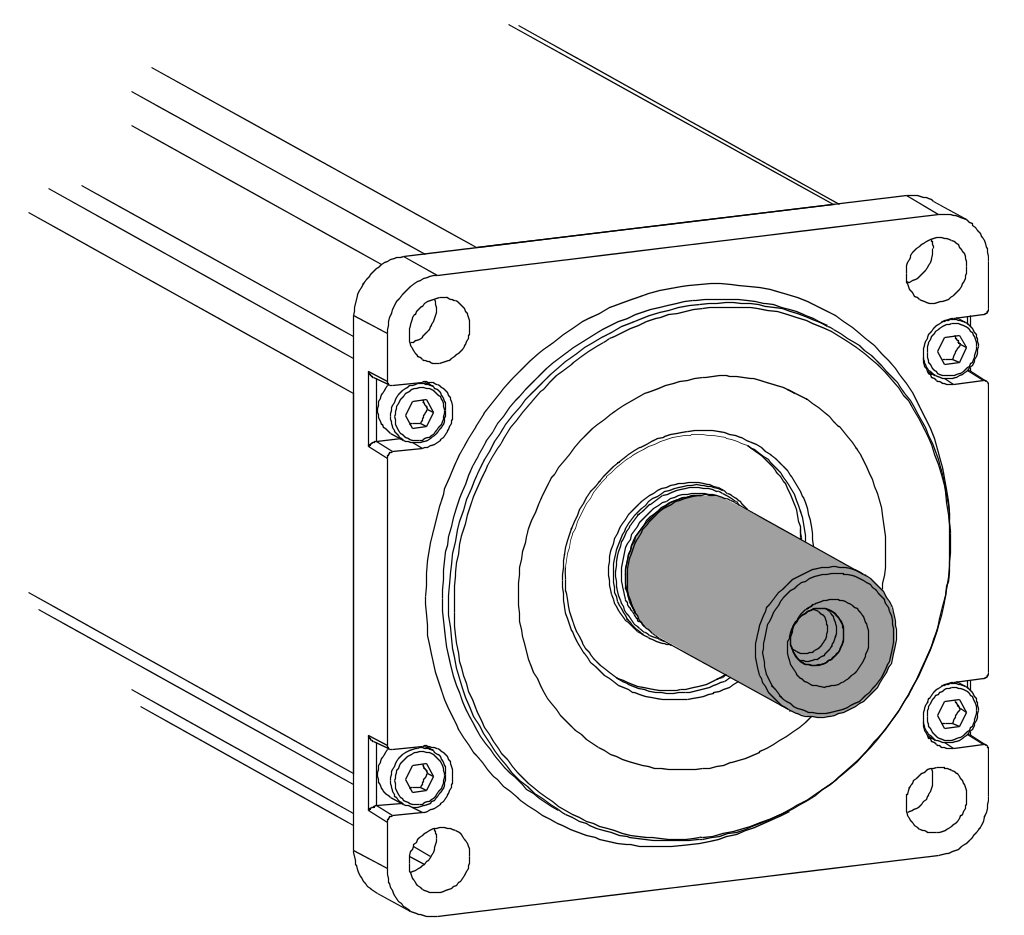 | Bout d'arbre lisse Le bout d'arbre lisse permet d'obtenir une liaison arbre-moyeu serrée, garantit une absence totale de jeu entre l’arbre et le moyeu, et assure un fonctionnement sans à-coups. Le bout d'arbre est pourvu d’un orifice central fileté. |
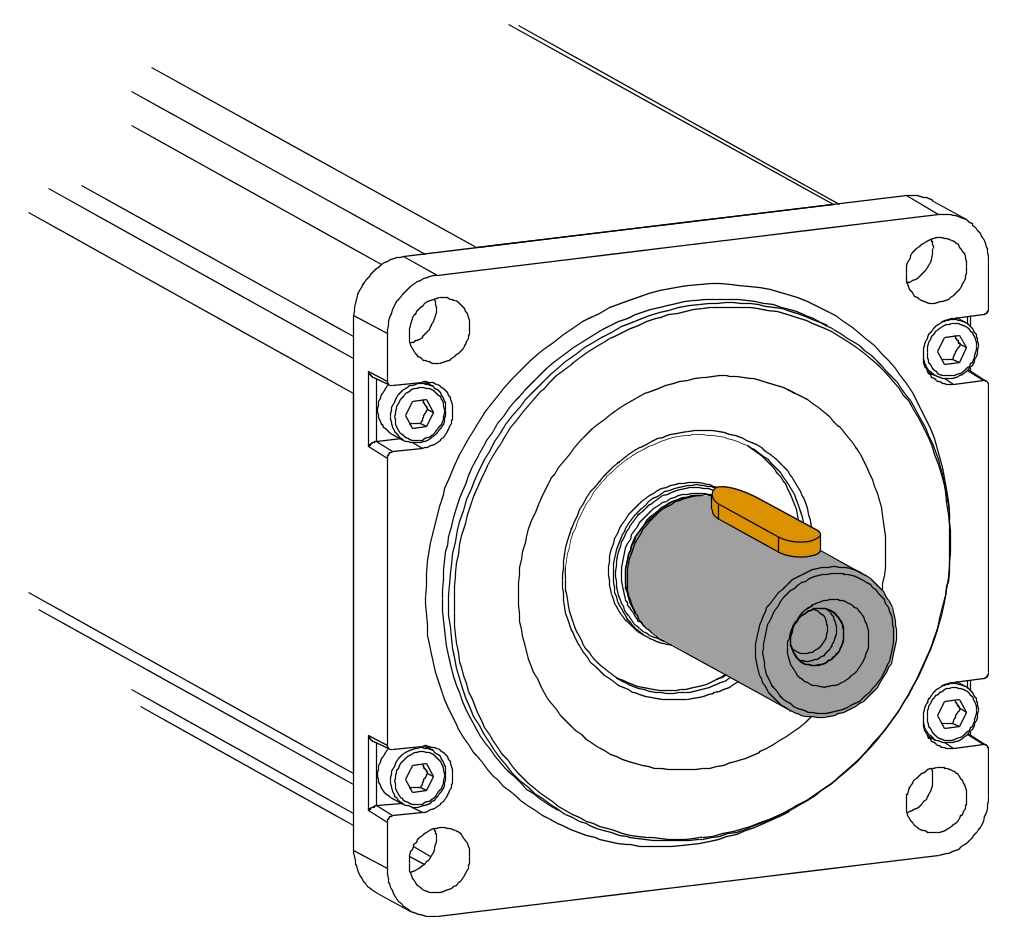 | Bout d'arbre claveté Le bout d'arbre claveté optimise le transfert de couple en sollicitant faiblement la liaison arbre-moyeu et s'utilise pour gérer les couples dont la direction est constante. Les rainures de clavettes sont conformes à la définition des rainures de forme N1 selon DIN 6885-1. Des clavettes de forme A selon DIN 6885-1 sont utilisées. L'équilibrage des moteurs clavetés est réalisé en utilisant la convention arbre-clavette selon DIN ISO 8821. Le bout de l’arbre est pourvu d’un orifice central fileté permettant de monter des actionneurs avec disques de couverture de bout d'arbre. |
Casse d'un arbre en raison d'une forte utilisation en marche arrière
La clavette peut sortir de son logement en cas d'utilisation intense en marche arrière. Dans certains cas, cela peut entraîner la rupture de l'arbre !
- Il est préférable d'utiliser des bouts d'arbre lisses avec des éléments de serrage.
Moteur endommagé en raison d'un déséquilibre.
Un moteur présentant un arbre à clavette ne doit pas fonctionner sans clavette. Un tel fonctionnement peut entraîner des déséquilibres et donc endommager le moteur.
- Dans ces cas-là, utiliser un arbre avec une extrêmité lisse.
Options moteur spéciales (gg)
Options moteur spéciales (gg)
8LW | b | c | d | . | ee | nnn | ff | gg | - | h | |||||||||||
Pas d'options moteur spéciales disponibles. Le code valide (gg) dans le numéro de commande est 00.
Version moteur (h)
Version moteur (h)
8LW | b | c | d | . | ee | nnn | ff | gg | - | h | |||||||||||
La version du moteur correspond au caractère (h) dans la référence produit. La version de moteur 0 est actuellement valide.
Exemple de commande 1
Exemple de commande 1
Un moteur synchrone triphasé (type 8LWA22) avec une vitesse nominale de 3 000 tr/min a été choisi pour une application.
Le raccordement doit se faire à l'aide d'une solution monocâble (hybride). Le moteur doit être équipé d’un frein de maintien, d'un arbre claveté et d’un codeur mono-tour EnDat.
Le code (ee) pour le codeur est B8.
Le code (nnn) pour une vitesse nominale de 3 000 tr/min est 030.
Le code (ff) pour les autres options moteur est S3.
La référence produit du moteur adéquat est donc 8LWA22.B8030S300-0.
Exemple de commande 2
Exemple de commande 2
Un moteur synchrone triphasé de type 8LWA33 avec une vitesse nominale de 4500 tr/min a été choisi pour une application.
Le raccordement doit se faire à l'aide d'un connecteur coudé double incorporé au moteur. Le moteur doit être dépourvu de frein de maintien, mais muni d’un arbre lisse et d’un resolver. Il doit aussi être fourni avec un joint d'étanchéité à l’huile.
Le code (ee) pour le codeur est R0.
Le code (nnn) pour une vitesse nominale de 4500 tr/min est 045.
Le code (ff) pour les autres options moteur est D6.
La référence produit du moteur est donc 8LWA33.R0045D600-0.