Los servoaccionamientos ACOPOSmulti integran las siguientes funciones con SafeMC, que permiten alcanzar los siguientes niveles de seguridad:
Función de seguridad | EN ISO 13849-1 | EN 61508/EN 62061 | ¿Requiere evaluación segura del encoder? |
|---|---|---|---|
Safe Torque Off (STO) | Pl e | SIL 3 | No |
Safe Operation Stop (SOS) | Pl d | SIL 2 | Sí |
Safe Stop 1 (SS1) | Pl e (supervisión de tiempo)/Pl d | SIL 3 (supervisión de tiempo)/SIL 2 | no (supervisión de tiempo)/sí |
Safe stop 2 (SS2) | Pl d | SIL 2 | Sí |
Safely Limited Speed (SLS) | Pl d | SIL 2 | Sí |
Safe Maximum Speed (SMS) | Pl d | SIL 2 | Sí |
Safe Direction (SDI) | Pl d | SIL 2 | Sí |
Safe Limited Increment (SLI) | Pl d | SIL 2 | Sí |
Safe Brake Control (SBC) | Pl e | SIL 3 | No |
STO - Safe Torque Off
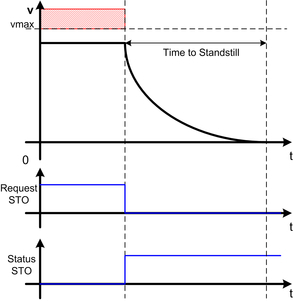
Safe Torque Off (STO) es el estado en el cual el motor ya no recibe suministro de potencia por parte del servoaccionamiento (es decir, está libre de par y fuerza). La fuente de alimentación del servoaccionamiento se corta con seguridad mediante la desactivación segura de impulsos. De esta forma, el servoaccionamiento no puede generar ningún par, ni tampoco ningún movimiento potencialmente peligroso.
STO está disponible para SafeLOGIC como una función de seguridad integrada, por lo que se puede solicitar directamente a través de la red. Esto elimina la necesidad de cableado externo.
La función de seguridad STO es la base de todas las otras funciones de seguridad. Se trata de la aplicación de la corriente de polarización a prueba de fallos y se aplica cada vez que se produce un error.
La función de seguridad STO corresponde a la categoría de parada 0 según la Normativa EN 602041/11.98 y cumple con el Nivel de Integridad de Seguridad 3 (SIL 3), de acuerdo con la Normativa EN 61508.
SOS - Safe Operating Stop
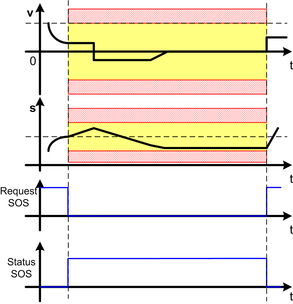
Safe Operating Stop (SOS) es el estado en el que se controla la parada segura del servoaccionamiento. Éste recibe alimentación y, por lo tanto, puede generar par y fuerza. Todas las funciones de control entre el autómata y el motor del servoaccionamiento están activas. La parada del eje se controla mediante una ventana de tolerancia de parada configurable. Se supervisa tanto la posición, como la velocidad. Se requiere un encoder EnDat 2.2 de seguridad para determinar la velocidad y la posición de forma segura. Si se exceden los límites de control de parada, se aplica la desactivación segura de impulsos y el servoaccionamiento pasa a un estado de error que debe confirmarse.
SS1 - Safe Stop 1
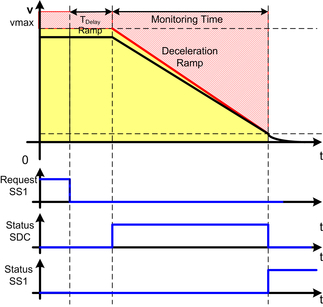
Durante Safe Stop 1 (SS1), se controla de forma segura la transición de motor en movimiento a detenido. Después de la desaceleración, se aplica la desactivación segura de impulsos y se desactiva el par y la potencia del servoaccionamiento. Dependiendo de los requisitos para la función de seguridad, es posible monitorizar sólo el tiempo de desaceleración o también la rampa de desaceleración. Si se exceden los límites de control durante la desaceleración, se aplica inmediatamente la desactivación segura de impulsos y el sistema pasa a un estado de error que debe validarse. Una ventaja de la supervisión de la rampa de desaceleración es que, cuando se produce un error, se reduce la distancia restante asumida hasta la detención.
Safe Stop 1 (SS1) se corresponde con la categoría de parada 1 de acuerdo con la Normativa EN 60204-1/11.98 y cumple con SIL3 cuando se utiliza la supervisión basada en el tiempo y con SIL2 cuando se utiliza la supervisión basada en la velocidad, de acuerdo con la Normativa EN 61508.
SS2 - Safe Stop 2
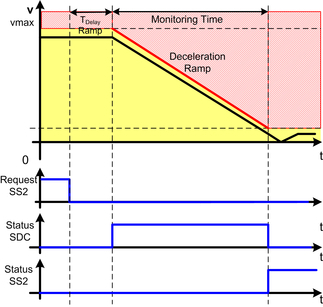
Durante Safe Stop 2 (SS2), se controla de forma segura la transición de motor en movimiento a detenido. Entonces, la aplicación estándar debe mantener el servoaccionamiento detenido. Al igual que con SOS, esta parada se controla con el módulo SafeMC de acuerdo con la ventana de tolerancia configurada.
Al igual que con SS1, dependiendo de los requisitos para la función de seguridad, es posible monitorizar sólo el tiempo de desaceleración o también la rampa de desaceleración. Si se exceden los límites durante la supervisión de la rampa o la supervisión de la detención subsiguiente, se aplica inmediatamente la desactivación segura de impulsos y el sistema pasa a un estado de error que debe validarse.
Safe Stop 2 (SS2) se corresponde con la categoría de parada 2 de acuerdo con la Normativa EN 60204-1/11.98 y cumple con SIL2, de acuerdo con EN 61508.
SLS - Safe Limited Speed
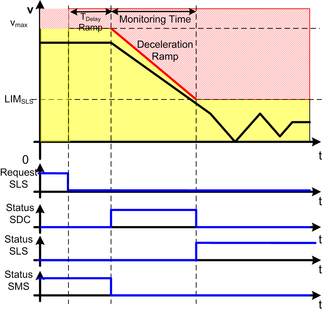
Con la función de seguridad SLS, el servoaccionamiento se controla para garantizar que no se exceden los límites de velocidad configurables. Dependiendo de la aplicación, la desaceleración también se puede controlar hasta que se alcanza el límite. Y dependiendo de los requisitos, la supervisión de la rampa de desaceleración se puede ajustar para monitorizar sólo el tiempo de desaceleración o también la rampa de desaceleración. Si se exceden los límites de velocidad durante la supervisión, se aplica inmediatamente la desactivación segura de impulsos y el sistema pasa a un estado de error que debe validarse.
La función de seguridad SLS cumple con SIL2 de acuerdo con la Normativa EN 61508.
SMS - Safe Maximum Speed
La diferencia entre SMS y SLS es que SMS no se puede iniciar activamente. Se activa o se desactiva con la configuración. Cuando se activa, la velocidad de la corriente se controla de forma constante de acuerdo con un límite predefinido. Si se excede el límite, se aplica inmediatamente la desactivación segura de impulsos y el sistema pasa a un estado de error que debe validarse.
SDI – Safe Direction
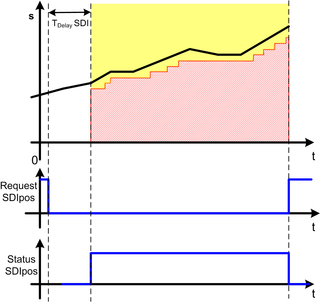
La función de seguridad SDI supervisa la dirección de movimiento predefinida. Si se excede el intervalo, se aplica inmediatamente la desactivación segura de impulsos y el sistema pasa a un estado de error que debe validarse. Es posible monitorizar o bien la dirección positiva o la negativa.
La función de dirección segura se puede activar en paralelo con otras funciones de seguridad.
Por ejemplo, SLS puede limitarse a una determinada dirección.
SLI - Safely Limited Interval
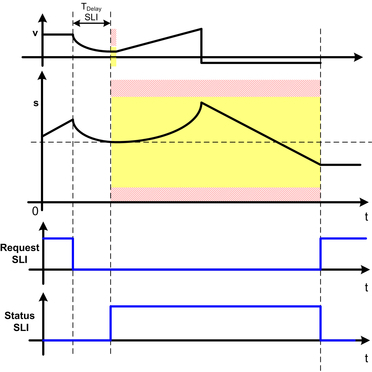
Con la función de seguridad SLI, se monitoriza el movimiento para mantener el número de incrementos predefinido.
Cuando se activa la función, es necesario detener el eje de seguridad. Se ha establecido una ventana de control de posición seguro, que depende del intervalo de seguridad configurado.
Si se excede el intervalo, se aplica inmediatamente la desactivación segura de impulsos y el sistema pasa a un estado de error que debe validarse.
SBC - Safe Brake Control
Safe Brake Control (SBC) envía una señal de salida segura para controlar un freno externo. La función de seguridad integrada SBC se puede solicitar de forma explícita a través de SafeLOGIC o cuando se produce un error en el módulo. Dependiendo de la calidad del freno conectado y su cableado, la función puede cumplir con SBC SIL3, de acuerdo con la Normativa EN 61508.