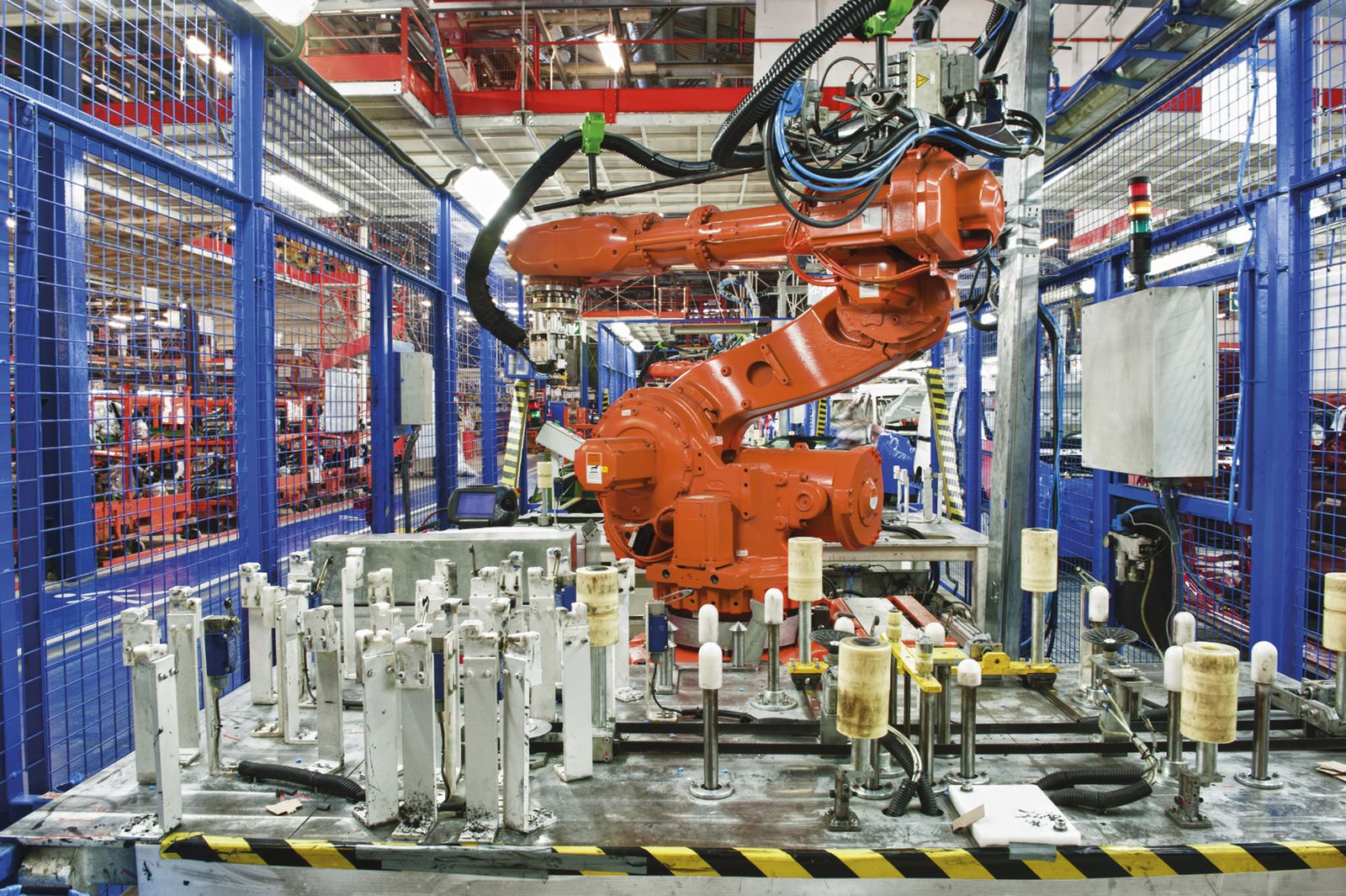
Los robots industriales se utilizan cada vez más en líneas de producción automatizadas. Sin embargo, hasta hace poco se aislaban en celdas para garantizar la seguridad de las personas que trabajaban en su proximidad. Utilizando bloques de funciones con certificación TÜV, B&R ha aumentado la seguridad para permitir que las personas y los robots trabajen codo con codo.
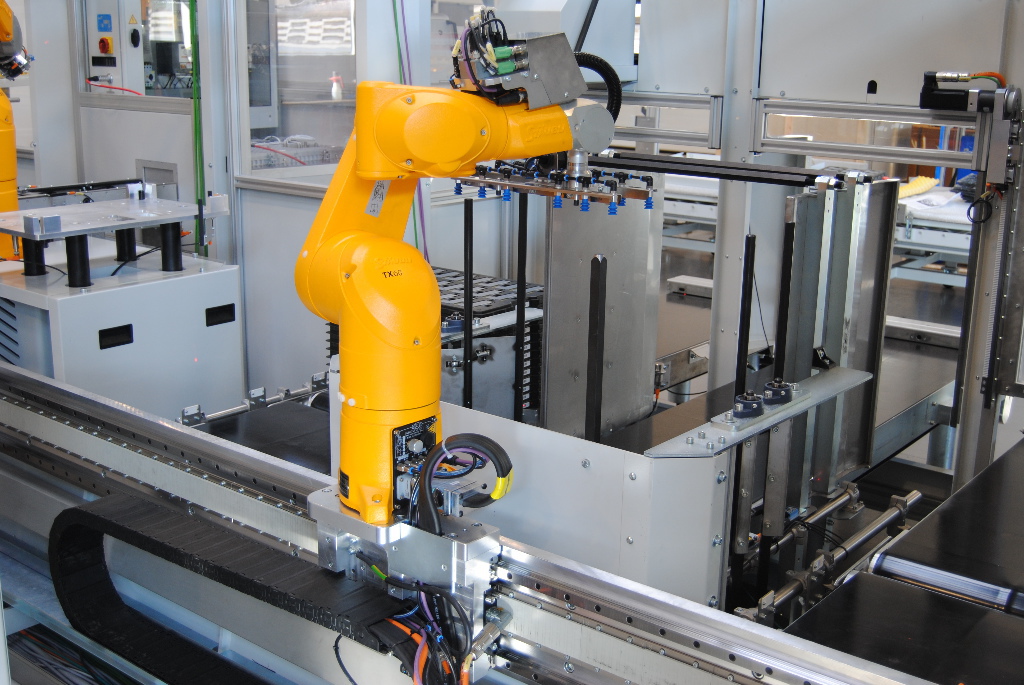
Al igual que las máquinas automatizadas, actualmente los robots industriales están asumiendo cada vez más responsabilidades en las líneas de producción. El modelo más común es un robot de brazo articulado con seis ejes de movimiento electromecánico. B&R se ha encargado de conseguir que los robots industriales sean tan seguros que puedan trabajar junto al hombre sin la necesidad de compuertas de seguridad ni jaulas.
Los requisitos de seguridad para los robots industriales y sistemas robotizados y su integración en entornos de trabajo con humanos se definen en la Normativa ISO 10218, Apartados 1 y 2. Entre otras cosas, estas normas especifican la tensión máxima a la que puede someterse el cuerpo humano. Estos límites superiores definidos garantizan que nada ni nadie esté expuesto a peligros graves. Como pauta general, se puede decir que una fuerza limitada de hasta 150 N, una velocidad de reducción segura de hasta 250 mm/s y una capacidad de detención automática garantizan que cualquier colisión sea inofensiva.
Seguridad con certificación TÜV en el punto central de la herramienta (TCP)
Los recorridos seguidos por las herramientas y las pinzas que los robots industriales utilizan para efectuar sus tareas son producto de complejos patrones de movimiento del eje en máquinas multiarticuladas. Es importante que la supervisión segura de la velocidad verifique no sólo cada eje individual, sino también el sistema robótico en su conjunto, incluyendo el punto central de la herramienta.
El primer paso hacia el objetivo de B&R para la ampliación de la seguridad de los robots se llevó a cabo en 2011 con la creación de la función "SLS at TCP" ("Safely Limited Speed at the Tool Center Point", o Velocidad limitada segura en el punto central de la herramienta). Esta biblioteca SafeROBOTICS contiene parámetros y bloques de funciones con certificación TÜV para uso en el entorno de programación segura de B&R, SafeDESIGNER.
Estos bloques de funciones se utilizan para programar aplicaciones de control de la seguridad que se ejecutan en autómatas SafeLOGIC. Las aplicaciones de seguridad leen los datos relativos al estado, la posición y la velocidad de cada eje y aplican transformaciones para calcular la velocidad real en el punto central de la herramienta, que a su vez se compara con los valores de seguridad especificados.
SafeMC: control de movimiento seguro
En los servoaccionamientos equipados con la función de control de movimiento seguro de B&R, SafeMC, tanto la lectura de los datos relacionados con la seguridad como la ejecución de las funciones de seguridad se llevan a cabo en el propio servoaccionamiento. Los datos se transportan de forma segura a través del protocolo de transferencia orientado a la seguridad independiente del bus de campo, openSAFETY.
SafeMC es un componente estándar integrado de todos los servoaccionamientos ACOPOSmulti de B&R. Éstos cuentan con una detección de errores típicos y un tiempo de respuesta de 7 ms (alrededor de una décima parte del tiempo posible con circuitos de seguridad de relé) lo cual acorta la distancia de frenado en un factor de 100.
Una solución muy eficiente de B&R
En la primera versión de la solución SafeROBOTICS, el módulo de software a cargo de la supervisión utilizaba un bloque de parámetros del modelo cinemático, que se podía configurar para todos los tipos de robots de uso común. Sin embargo, esto presentaba una gran desventaja, ya que la aplicación de seguridad resultante tenía que certificarse por separado para cada tipo de robot.
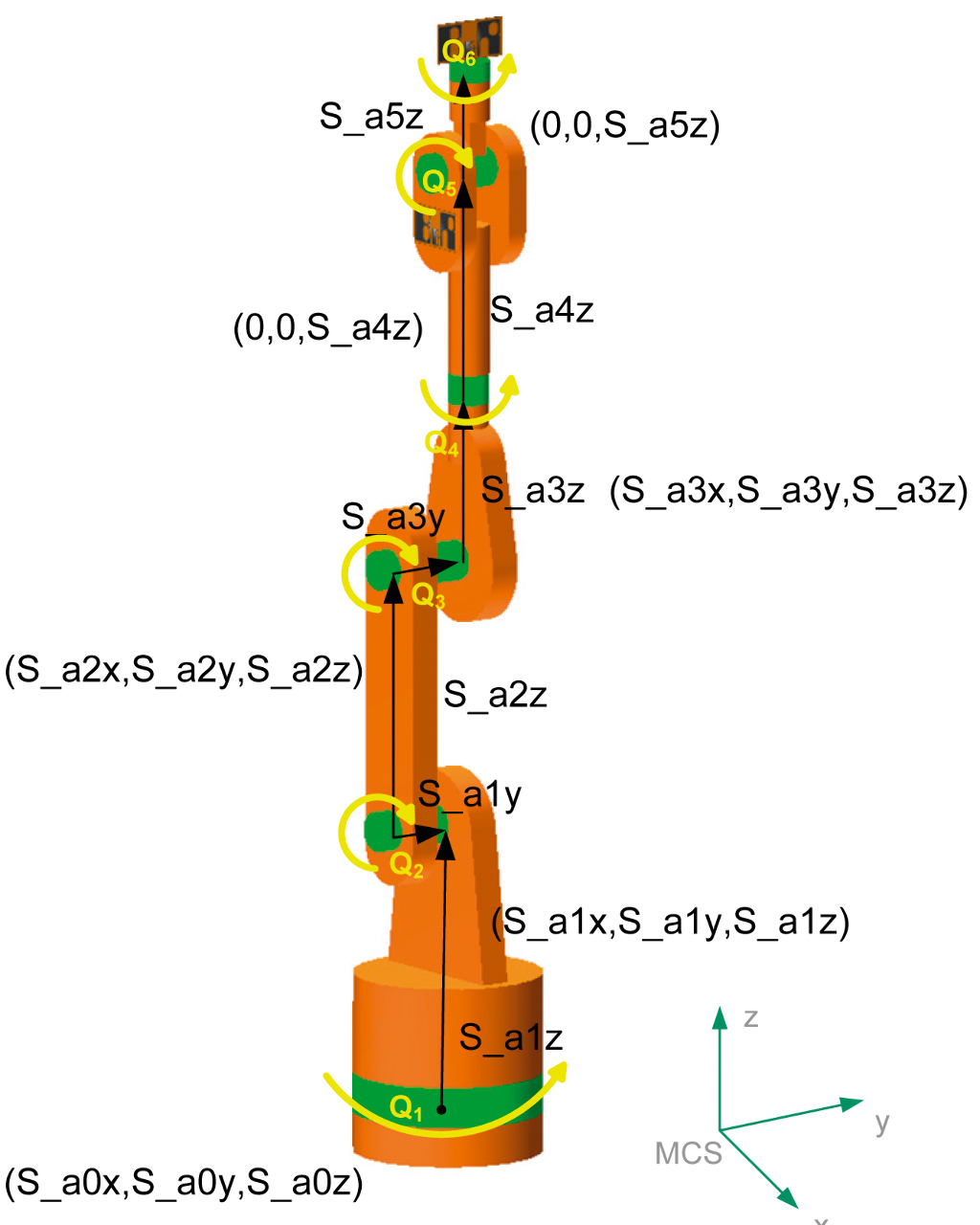
Para ahorrar este gasto y las molestias a sus clientes, B&R ha desarrollado una solución mucho más eficiente, basada en un bloque de parámetros de modelado cinemático estandarizado. La ventaja de este enfoque es clara: los bloques de parámetros estandarizados pueden aplicarse a cualquier cadena cinemática concebible con hasta once ejes giratorios y de empuje, independientemente de los valores específicos que contengan.
Mayor libertad y comodidad
El hecho de que cada aplicación de seguridad sólo necesite certificarse una vez es sólo una de las ventajas que ofrece la solución de B&R. Los parámetros de transformación también permiten el modelado de configuraciones mixtas donde el propio robot está montado en un eje de pórtico lineal o mesa giratoria.
Los parámetros también pueden manejar construcciones donde múltiples ejes están acoplados mecánicamente. En este caso, la rotación del eje 4, por ejemplo, cambia la orientación del eje 5.
Una de las características avanzadas de SafeROBOTICS es un nuevo bloque de funciones diseñado para gestionar los grados de libertad adicionales en sistemas complejos. Este bloque de funciones verifica la plausibilidad de los parámetros almacenados. Todo esto convierte al "SLC at TCP" en un bloque de seguridad fácil de usar, especialmente cuando los usuarios aprovechan los bloques de parámetros preinstalados para los robots estándar proporcionados por los principales fabricantes.
Soporte óptimo para los usuarios
Los usuarios pueden elegir libremente el tipo de control que mejor funcione, ya sea el autómata del robot del fabricante de la cadena cinemática o la integración en un sistema de control global. Esto es posible gracias al protocolo de seguridad abierto e independiente del bus, openSAFETY. Todo lo que se necesita es información de posición orientada a la seguridad y la capacidad para que los servoaccionamientos procesen reacciones seguras. Los componentes del servoaccionamiento como ACOPOSmulti con SafeMC son más adecuados para estas tareas debido a sus funciones de seguridad integradas y al aumento de las capacidades de reacción.
Desde la invención del robot articulado de seis ejes impulsado de forma electromecánica hace más de 40 años, nunca había sido tan fácil permitir que los humanos y las máquinas trabajaran de manera segura.

"Los usuarios de SafeROBOTICS no necesitan saber cómo se calculan las curvas de trayectoria y la velocidad. Todo ello lo gestionan las funciones de transformación integradas. Con este soporte óptimo, pueden centrarse en sus actividades principales".
Dr. Gernot Bachler, Departamento de Investigación y Desarrollo de Movimiento de B&R
Los usuarios pueden elegir libremente el tipo de control que mejor funcione, ya sea el autómata del robot del fabricante de la cadena cinemática o la integración en un sistema de control global. Esto es posible gracias al protocolo de seguridad abierto e independiente del bus, openSAFETY.