Immer häufiger werden Industrieroboter in der automatisierten Fertigung eingesetzt. Bislang allerdings mussten sie aus Sicherheitsgründen in Zellen isoliert werden. B&R hat mit TÜV-zertifizierten Funktionsbausteinen die Robotersicherheit so weit erhöht, dass Mensch und Roboter Hand in Hand zusammenarbeiten können.
Neben Maschinen übernehmen zunehmend auch Industrieroboter Tätigkeiten in der Fertigung. Am weitverbreitetsten sind Knickarmroboter mit sechs elektromechanisch angetriebenen Bewegungsachsen. Ziel von B&R ist es, Industrieroboter so sicher zu machen, dass sie ohne trennende Schutzeinrichtungen mit Menschen Hand in Hand arbeiten können.
Geregelt werden die sicherheitstechnischen Anforderungen an Industrieroboter bzw. Robotersysteme in Kollaboration mit menschlicher Arbeitskraft in den Normen EN ISO 10218, Teil 1 und Teil 2. Sie legen unter anderem fest, bis zu welchem Maß der menschliche Körper belastet werden darf. Diese definierten Höchstgrenzen gewährleisten, dass Menschen, die mit Robotern zusammenarbeiten, nicht ernsthaft gefährdet werden. Als Richtwert gilt: Eine sichere Kraftbegrenzung auf max.150N, eine sicher auf max. 250 mm/s reduzierte Geschwindigkeit und selbsttätiges Anhalten bei Annäherung halten die Folgen von Kollisionen harmlos.
TÜV-zertifizierte Sicherheit am TCP
Ein TÜV-zertifizierter Funktionsbaustein ermöglicht die Überwachung des Werkzeugarbeitspunktes. Die Parameter dazu sind normiert und werden aus einer hinterlegten Tabelle mit den tatsächlichen Werten nachgeladen. So ist die Verwendung unterschiedlicher Kinematiken ohne Neuzertifizierung einfach möglich.
Hinter den Verfahrwegen von Werkzeugen oder Greifern, mit denen Industrieroboter ihre Arbeit verrichten, stehen komplexe Achs-Bewegungsmuster der vielgelenkigen Maschinen. Wichtig ist, dass sich die sichere Überwachung der Geschwindigkeit nicht nur auf einzelne Achsen bezieht, sondern auf den gesamten Roboter und damit auch auf den Werkzeugarbeitspunkt (TCP: Tool Center Point).
Als ersten Baustein einer erweiterten Roboter-Sicherheit schuf B&R 2011 die Funktion SLS (Safely Limited Speed) am TCP als SafeROBOTICS-Bibliothek mit TÜV-zertifizierten Parameter- und Funktionsbausteinen für die sichere Programmierumgebung SafeDESIGNER.
Mit diesen Funktionsbausteinen werden sicherheitsgerichtete Steuerungsprogramme in der Sicherheitssteuerung SafeLOGIC entwickelt. Diese ermitteln durch Transformation der sicheren Informationen über Status, Position und Geschwindigkeit der einzelnen Achsen die tatsächliche Geschwindigkeit am Werkzeugarbeitspunkt und vergleichen sie mit den sicheren Vorgabewerten.
SafeMOTION – sichere Bewegungssteuerung
Direkt in den Antrieben, die mit der sicheren Bewegungssteuerung SafeMOTION ausgestattet sind, erfolgt sowohl die Aufnahme der sicheren Daten als auch die Ausführung der Sicherheitsfunktionen. Sicher übertragen werden die Informationen über das feldbusunabhängige, sicherheitsgerichtete Übertragungsprotokoll openSAFETY.
SafeMOTION ist integraler Bestandteil der ACOPOSmulti-Servoantriebe von B&R. Die Antriebe weisen eine typische Fehleraufdeckungs- und Reaktionszeit von 7 ms auf. Das entspricht etwa einem Zehntel dessen, was mit Relais-Sicherheitsschaltungen erzielbar ist und verkürzt den Anhalteweg um den Faktor 100.
B&R entwickelt effiziente Lösung
In der ersten Version der SafeROBOTICS-Funktionen bediente sich das Überwachungs-Softwaremodul eines Kinematik-Beschreibungsbausteins. Dieser ist für alle gängigen Robotertypen frei konfigurierbar. Allerdings birgt dies einen Nachteil: Die resultierende Sicherheitsapplikation müsste für jeden Robotertyp separat zertifiziert werden.
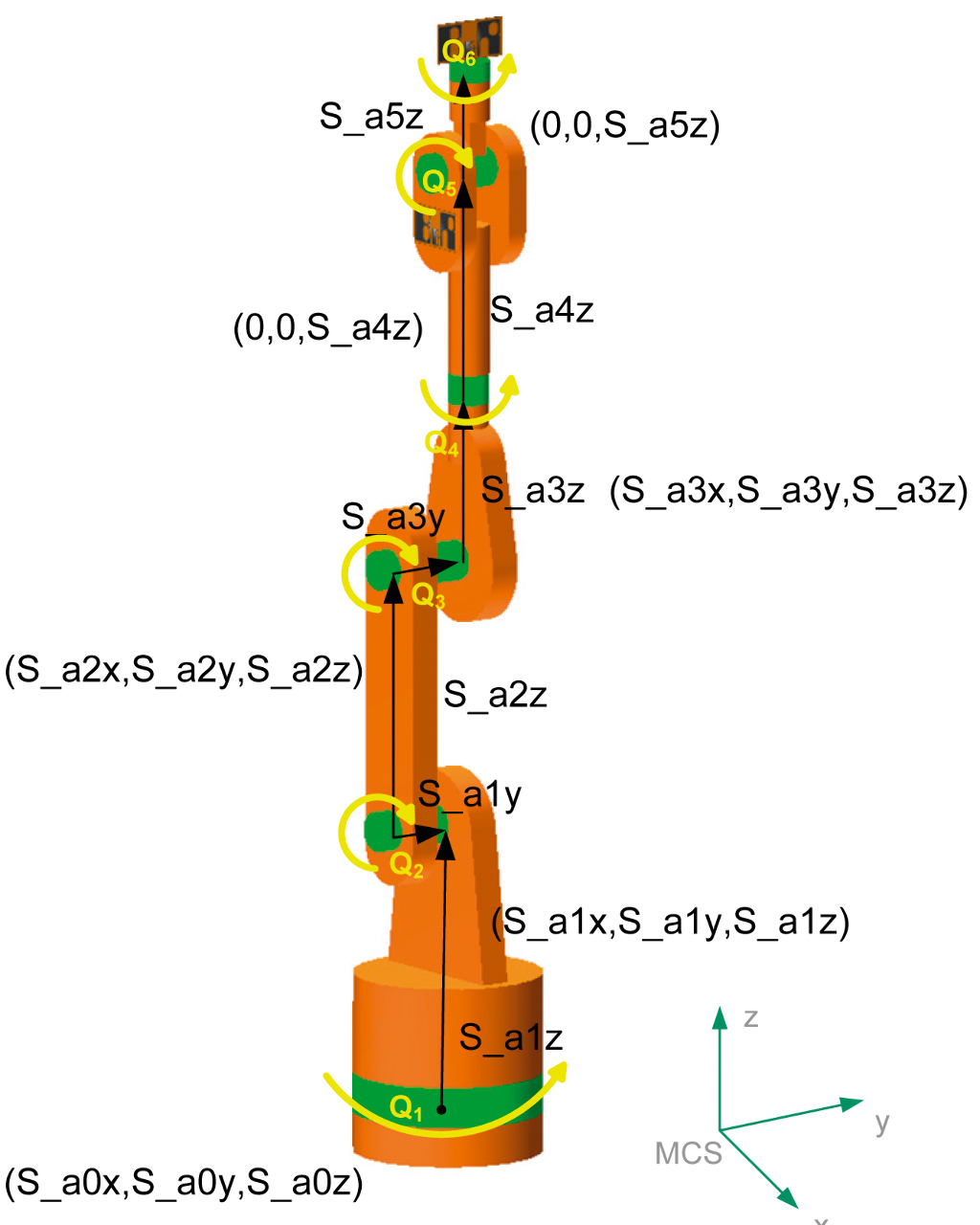
Um Kunden diesen Aufwand abzunehmen, hat B&R eine effizientere Lösung entwickelt und verwendet nun einen Satz homogener Parameter zur Kinematikbeschreibung. Der Vorteil liegt klar auf der Hand: Dieser ist unabhängig von den tatsächlich hinterlegten Werten allgemein für jede erdenkliche Kinematik mit bis zu elf Dreh- oder Schubachsen gültig.
Mehr Freiheit mit zusätzlichem Komfort
Dass die Programmierung für die Sicherheitssteuerung nicht erneut zertifiziert werden muss, ist jedoch nur ein Vorteil der B&R-Lösung. Darüber hinaus können mittels der Parameter für die Transformation auch Mischkonfigurationen beschrieben werden. Dabei bewegt sich der Roboter zusätzlich auf einer linearen Portalachse oder auf einem Rundtisch.
Mittels der Parameter werden auch Mechaniken beherrschbar, bei denen unterschiedliche Achsen mechanisch miteinander verkoppelt sind. Dreht sich zum Beispiel Achse 4, so ändert Achse 5 gleichzeitig ihren Winkel.
Teil der erweiterten Möglichkeiten von SafeROBOTICS ist ein weiterer Funktionsblock, der die zusätzlichen Freiheitsgrade leichter handhabbar macht. Er prüft die hinterlegten Parameter auf Plausibilität. So wird die Safely Limited Speed am Tool Center Point zum einfach anwendbaren Sicherheits-Baukasten – speziell wenn Anwender auf vorinstallierte Parametersätze handelsüblicher Robotertypen zurückgreifen, die von den Roboterherstellern bereitgestellt werden.
Anwender werden optimal unterstützt
Bei der Art der Ansteuerung hat der Anwender freie Wahl, unabhängig davon ob die Robotersteuerung des Kinematikherstellers verwendet wird oder eine Einbindung in allgemeine Steuerungssysteme besteht. Möglich macht dies das offene und busunabhängige Sicherheitsprotokoll openSAFETY. Einzige Voraussetzung ist lediglich die Bereitstellung sicherheitsgerichteter Positionsdaten und die Möglichkeit der Antriebe, sichere Reaktionen zu verarbeiten. Bestens geeignet dafür sind Antriebskomponenten wie ACOPOSmulti SafeMOTION Module aufgrund der integrierten Sicherheitsfunktionen und der erhöhten Reaktionsfähigkeit.
Seit der Erfindung des elektromechanisch angetriebenen Sechsachs-Knickarmroboters vor gut 40 Jahren war es noch nie so leicht, Mensch und Maschine sicher zusammenarbeiten zu lassen.

„Anwender von SafeROBOTICS benötigen kein Wissen über die Berechnung von Bahnkurven oder -geschwindigkeiten. Die Berechnung übernehmen eingebaute Transformationsfunktionen. Anwender werden dadurch optimal unterstützt und können sich auf ihre Kernaufgaben konzentrieren.“
Dr. Gernot Bachler, Research & Development Motion bei B&R

Bei der Art der Ansteuerung hat der Anwender freie Wahl, unabhängig davon ob die Robotersteuerung des Kinematikherstellers verwendet wird oder eine Einbindung in allgemeine Steuerungssysteme besteht. Möglich macht dies das offene und busunabhängige Sicherheitsprotokoll openSAFETY.